the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 02 Dec 2022
| 02 Dec 2022
Exploring tracer information in a small stream to improve parameter identifiability and enhance the process interpretation in transient storage models
Enrico Bonanno
Günter Blöschl
Julian Klaus
The transport of solutes in river networks is controlled by the interplay of processes such as in-stream solute transport and the exchange of water between the stream channel and dead zones, in-stream sediments, and adjacent groundwater bodies. Transient storage models (TSMs) are a powerful tool for testing hypotheses related to solute transport in streams. However, model parameters often do not show a univocal increase in model performances in a certain parameter range (i.e. they are non-identifiable), leading to an unclear understanding of the processes controlling solute transport in streams. In this study, we increased parameter identifiability in a set of tracer breakthrough experiments by combining global identifiability analysis and dynamic identifiability analysis in an iterative approach. We compared our results to inverse modelling approaches (OTIS-P) and the commonly used random sampling approach for TSMs (OTIS-MCAT). Compared to OTIS-P, our results informed about the identifiability of model parameters in the entire feasible parameter range. Our approach clearly improved parameter identifiability compared to the standard OTIS-MCAT application, due to the progressive reduction of the investigated parameter range with model iteration. Non-identifiable results led to solute retention times in the storage zone and the exchange flow with the storage zone with differences of up to 4 and 2 orders of magnitude compared to results with identifiable model parameters respectively. The clear differences in the transport metrics between results obtained from our proposed approach and results from the classic random sampling approach also resulted in contrasting interpretations of the hydrologic processes controlling solute transport in a headwater stream in western Luxembourg. Thus, our outcomes point to the risks of interpreting TSM results when even one of the model parameters is non-identifiable. Our results showed that coupling global identifiability analysis with dynamic identifiability analysis in an iterative approach clearly increased parameter identifiability in random sampling approaches for TSMs. Compared to the commonly used random sampling approach and inverse modelling results, our analysis was effective at obtaining higher accuracy of the evaluated solute transport metrics, which is advancing our understanding of hydrological processes that control in-stream solute transport.
- Article
(2972 KB) - Full-text XML
- BibTeX
- EndNote





It is of crucial importance to understand how nutrients, solutes, and pollutants are transported in streams, since this process can drastically affect stream water quality along river networks (Smith, 2005; Krause et al., 2011; Rathfelder, 2016). A widely used technique to capture and study the processes controlling water transport downstream is via in-stream tracer injections. The measurement of the concentration over time of a tracer released in an upstream section (i.e. the breakthrough curve, BTC) reflects stream discharge (Beven et al., 1979; Butterworth et al., 2000) and longitudinal tracer advection and dispersion (Gooseff et al., 2008). A milestone in the study of solute transport was that in-stream solutes and water are exchanged with slowly moving channel waters, the dead zones (Hays, 1966), and with the saturated area that is physically influenced by water and solute exchange between the stream channel and the adjacent groundwater (i.e. the hyporheic zone, Triska et al., 1989; White, 1993; Cardenas and Wilson, 2007). This hydrologic exchange results in a skewed non-Fickian BTC with a pronounced tail, which makes the advection–dispersion equation (ADE) unable to correctly describe the observed tracer transport in stream channels (Bencala and Walters, 1983; Castro and Hornberger, 1991). Despite the large number of studies, the results of transient storage models (TSMs) offer numerous contradictory model interpretations (Ward and Packman, 2019), and model parameters are often non-identifiable, meaning that several parameter combinations return the same model performances (Ward et al., 2017). These outcomes raise the question of how informative such modelling results are (Knapp and Kelleher, 2020).
Considerable potential in reducing the uncertainty of the processes controlling solute transport in streams lies in modelling the tail of the BTC, since it contains information on the transient storage of the stream channels (Bencala et al., 2011). To simulate the retentive effect of dead zones on solute transport, Hays (1966) modelled the tail of the BTC by introducing a second differential equation in addition to the ADE. Following a similar approach, Bencala and Walters (1983) described the solute transport in streams as a pure advection–dispersion transport coupled with a hydrologic exchange term between the stream channel and a single, homogeneously mixed volume that delays the solute movement downstream (TSM). The estimation of model parameters often relies on the use of inverse modelling approaches via non-linear regression algorithms that return an estimation of model parameters with a narrow 95 % confidence interval (OTIS-P; Runkel, 1998). While this approach was widely applied in past decades, it does not allow a comprehensive assessment of parameter identifiability (Ward et al., 2017; Knapp and Kelleher, 2020). The term “identifiability” describes whenever good model performances are constrained in a relatively narrow parameter range (identifiable parameter) or spread (non-identifiable parameter) across the entire distribution of the possible parameter values (Ward et al., 2017), yet a good fit to observed data through inverse modelling does not provide information on performances and parameter identifiability over the entire feasible parameter range (Ward et al., 2017). Also, calibrated parameters obtained via inverse modelling approaches are not necessarily meaningful, as non-identifiable parameters can provide a good inverse model fit (Kelleher et al., 2019). These modelling uncertainties have led to a progressive abandonment of the search for a single best set of parameters and advocated the identification of “behavioural” parameter populations (i.e. parameter sets satisfying certain performance thresholds) via random sampling approaches in transient storage modelling (Wlostowski et al., 2013; Ward et al., 2017, 2018; Kelleher et al., 2019; Rathore et al., 2021).
Random sampling approaches provide information on parameter identifiability in the feasible parameter range; however, they rarely show identifiability for all the model parameters (Knapp and Kelleher, 2020). Kelleher et al. (2013) found that the parameters associated with the transient storage process are not identifiable for a large variety of stream reaches and experiments that they investigated. Other studies have shown that model parameters are often poorly identifiable (Camacho and González, 2008; Wlostowski et al., 2013; Ward et al., 2017; Kelleher et al., 2019; Knapp and Kelleher, 2020) and highly interactive, meaning that different parameters can produce similar modelled BTCs (Kelleher et al., 2013). This, in turn, hampers the ability to distinguish the role of a specific parameter in the shape of the simulated BTC (Wagener et al., 2002b; Ward et al., 2017).
The observed strong non-identifiability of model parameters in random sampling studies may have three causes. First, the parameters describing the advection–dispersion process (streamflow velocity, cross-sectional area of the stream channel, and longitudinal dispersion) are known to be the best ones identifiable in the TSM (Ward et al., 2017). However, due to the known high interactivity among model parameters, it is generally not recommended to use a fixed value for a rather identifiable parameter, since this strategy may result in a misestimation of the other model parameters (Knapp and Kelleher, 2020). Constraining the values of the stream area and longitudinal dispersion proved to have a role in the identifiability of transient storage parameters (Lees et al., 2000; Kelleher et al., 2013; Ward et al., 2017). However, no study so far has evaluated the role of flow velocity in the identifiability of model parameters despite the velocity parameter often being considered known and thus fixed to equal the velocity of the arrival time of the BTC peak (i.e. vpeak, Ward et al., 2013, 2017, 2018; Kelleher et al., 2013; Wlostowski et al., 2017). This leads to the question of how meaningful and identifiable the transient storage parameters are when streamflow velocity is considered as a calibration parameter or is kept fixed in identifiability analysis. A second cause of non-identifiable model parameters relates to the selected approach for addressing parameter identifiability. The identifiability analysis used in most studies is based on the generalized likelihood uncertainty estimation that assesses parameter certainty by evaluating model performance on the entire BTC (GLUE, Beven and Binley, 1992; Camacho and González, 2008; Kelleher et al., 2013; Ward et al., 2017; Kelleher et al., 2019). However, such global identifiability analysis is unable to assess whether a certain parameter is more or less identifiable in certain sections of the BTC (Wagener et al., 2002a, 2003; Wagener and Kollat, 2007). This information is particularly important for BTC modelling, since advection–dispersion parameters are physically responsible for the bulk solute transport in the stream, and they are therefore expected to act on the rising limb and peak of the BTC (Gooseff et al., 2008). In contrast, the parameters describing the exchange between the stream channel and the transient storage zone are responsible for delaying solute transport compared to the advective–dispersive transport, most likely acting on the falling limb and tail of the BTC (Runkel, 2002). By investigating parameter identifiability across the entire BTC, global identifiability analysis is unable to capture an increase in parameter identifiability towards the tail of the BTC. However, studies addressing the identifiability of model parameters in different sections of the BTC reported increased identifiability for transient storage parameters on the tail of the BTC (Wagener et al., 2002b; Scott et al., 2003; Wlostowski et al., 2013; Kelleher et al., 2013). Third, there is no common strategy for selecting parameter ranges and the number of parameter sets in TSM simulations. To obtain reliable results, Ward et al. (2017) suggested that modelling studies need to apply TSMs to a large number of parameter sets (between 10 000 and 100 000) over a parameter range spanning at least 2 orders of magnitude. While for some studies the non-identifiability of parameters might be explained by the low number of parameter sets (less than 10 000) and the relatively narrow selected parameter range (Wagener et al., 2002b; Camacho and González, 2008; Wlostowski et al., 2013), non-identifiability was also found when a rather large number of parameter sets and a wide parameter range were used (Kelleher et al., 2013, 2019; Ward et al., 2017). This brings up the question of whether and when model parameters are actually meaningful (Knapp and Kelleher, 2020).
A robust assessment of transient storage parameters would not only improve the model fit of tracer transport and increase parameter identifiability, but it might also lead to a more robust interpretation of the physical processes controlling solute transport in streams. Model parameters are often used to calculate metrics on the solute exchange between the stream channel and the transient storage zone and the residence time of solutes in the coupled system (Thackston and Schnelle, 1970; Morrice et al., 1997; Hart et al., 1999; Runkel, 2002). These metrics are pivotal for addressing the potential for nutrient cycling, microbial activity, and the development of hotspots in river ecosystems (Triska et al., 1989; Mulholland et al., 1997; Smith, 2005; Krause et al., 2017). However, no study so far has indicated and evaluated whether and how much the interpretation of hydrologic processes changes when model parameters are identifiable and when they are not, due to the enunciated challenges in TSMs.
Despite the increasing need for achieving parameter identifiability in TSMs, only a few studies have explored the reliability of results obtained from inverse modelling, and model interpretation is often based on a single set of parameters without testing their robustness (Knapp and Kelleher, 2020). We hypothesize that addressing the identifiability of model parameters in different sections of the BTC is key to increasing the identifiability of the parameters describing solute retention in streams. To address the enunciated TSM challenges, we have organized this contribution around three questions related to the key challenges of parameter identifiability in transient storage modelling.
-
How does the identifiability of model parameters change in the random sampling of TSMs when velocity is considered as a calibration parameter and when it is assumed fixed and equal to vpeak?
-
Does the identifiability analysis of specific sections of the BTC reduce the parameter non-identifiability in random sampling approaches of TSMs?
-
How much does the identifiability of model parameters in random sampling approaches depend on the used parameter range and the number of parameter sets?
With the outcomes of these questions, we will address the following question.
- 4.
How does the hydrologic interpretation of TSM results vary when model parameters are identifiable and when they are not?
2.1 Study site and tracer data
The studied stream reach (49∘49′38′′ N, 5∘47′44′′ E) is located in western Luxembourg, downstream of the Weierbach experimental catchment (Hissler et al., 2021; Fabiani et al., 2022). The stream channel is unvegetated with a slope of ≃6 % and consists of deposited colluvium material and fragmented schists (up to 50 cm depth) with local outcrops of fractured slate bedrock in the streambed. The flow regime is governed by the interplay of seasonality between precipitation and evapotranspiration (Rodriguez and Klaus, 2019; Rodriguez et al., 2021) with a persistent discharge between autumn and spring and little to no discharge during summer months (discharge arithmetic mean equal to 6.5 L s−1, median of 1.7 L s−1, SD of 11.52 L s−1 between August 2018 and February 2020; Bonanno et al., 2021). To answer our research questions, we utilize three tracer experiments with an instantaneous tracer injection at three different flow (Q) conditions: 6 December 2018, Q=2.52 L s−1 (E1); 23 January 2019, Q=9.05 L s−1 (E2); 28 January 2019, Q=22.79 L s−1 (E3). For each experiment, we prepared a NaCl solution using 2 L of stream water and 100 g of reagent-grade NaCl. We injected the solution into a turbulent pool at the beginning of the stream reach to ensure complete mixing in the stream water. Electric conductivity (EC) was measured via a portable conductivity meter (WTW) 55 m downstream of the injection point. Automatic compensation of stream temperature occurred (nLF, according to EN 27 888). EC-Cl− conversion was obtained using a known volume sample of stream water taken before tracer injection at the measurement location and adding known quantities of a solution with a known concentration of NaCl. Conversion into Cl− concentration was obtained via an EC-Cl− regression line (R2=0.9999). Discharge was calculated for every slug injection via the dilution gauging method using the Cl− concentration obtained for each BTC (Beven et al., 1979; Butterworth et al., 2000).
2.2 Advection–dispersion equation and transient storage model formulation
The one-dimensional Fickian-type advection–dispersion equation describes the combined effect of flow velocity and turbulent diffusion on solute transport (Beltaos and Day, 1978; Taylor, 1921, 1954). The differential form of the ADE reads as
where t is time (T), x is the distance from the injection point along the stream reach (L), A (L2) is the cross-sectional area of flow, v (L T−1) is the average flow velocity, D (L2 T−1) is the longitudinal dispersion coefficient, and C is the concentration of the observed tracer above background levels (M L−3). The solution of the differential form of the ADE for an instantaneous solute injection at x=0 (L) reads as
where M is the injected solute mass (M), t is time (T), and L is the length of the investigated reach (L).
The TSM describes the solute transport in streams by combining the advection–dispersion process in the stream channel through a hydrologic exchange with an external storage zone. The model equations read as (Bencala and Walters, 1983)
where the hydrologic exchange with the transient storage zone is driven by the exchange coefficient α (T−1) and the area of the transient storage zone, ATS (L2). Here, we will refer to A, v, and D as “advection–dispersion parameters” and to ATS and α as “transient storage parameters”. The solute concentrations in the main channel and the transient storage zone are C and CS (M L−3) respectively. The performances of both ADE and TSM results are evaluated using the root mean squared error objective function (RMSE). RMSE is an equivalent form of the residual sum of squares (RSS) and mean absolute error (MAE) objective functions that are used in OTIS-P (the most frequently adopted inverse modelling approach for TSMs, Runkel, 1998) and by the dynamic identifiability analysis (Wagener et al., 2002a, b). RMSE allowed us a comparison of our TSM results with OTIS-P and with dynamic identifiability analysis consistent with previous studies (Wlostowski et al., 2013; Ward et al., 2017).
2.3 Random sampling and global identifiability analysis
Several sampling approaches were previously used to estimate parameter identifiability in TSMs, such as Monte Carlo sampling (Wagner and Harvey, 1997; Wagener et al., 2002b; Ward et al., 2013), Latin hypercube sampling (LHS, Ward et al., 2018; Kelleher et al., 2019), and a Monte Carlo approach coupled with a behavioural threshold (Kelleher et al., 2013; Ward et al., 2017). Here, we use LHS to sample from the selected parameter range due to LHS's higher efficiency compared to the classic Monte Carlo approach (Yin et al., 2011). A single combination of model parameters (A, v, and D for ADE and A, v, D, ATS, and α for TSMs) obtained from the random sampling approach is herein referred to as a “parameter set”.
To obtain reliable TSM results, Ward et al. (2017) suggested a minimum number of parameter sets between 10 000 and 100 000. Thus, in each TSM iteration, we simulated 115 000 parameter sets. Results of each TSM iteration include RMSE values for the 115 000 parameter sets and results of identifiability analysis of the model parameters. The identifiability analysis includes parameter vs. RMSE plots (Wagener et al., 2003), parameter distribution plots (Ward et al., 2017), regional sensitivity analysis (Wagener and Kollat, 2007; Kelleher et al., 2019), and parameter distribution plots (Wagener et al., 2002a; Ward et al., 2017). Since the above-mentioned identifiability analysis refers to model performance (RMSE) evaluated on the entire BTC, we refer to it as a “global identifiability analysis”. Globally identifiable parameters satisfy the following criteria: a univocal peak of performance in parameter vs. RMSE plots and parameter distribution plots (Ward et al., 2017) and cumulative distribution functions (CDFs) corresponding to the best 0.1 % of the results deviating from the 1:1 line and from parameter CDFs corresponding to the best 10 % of the results (Kelleher et al., 2019). We selected these behavioural thresholds (top 0.1 % and top 10 %) to ensure consistency with previous work (Wagener et al., 2002b; Wlostowski et al., 2013; Ward et al., 2013, 2017; Kelleher et al., 2019. Parameter identifiability is usually evaluated via visual inspection of the plots from the global identifiability analysis (Wagener et al., 2002a; Wlostowski et al., 2013; Ward et al., 2017, 2018; Kelleher et al., 2019). To couple visual inspection with a numerical measure able to express the degree of identifiability of a certain parameter, we evaluated the two-sample Kolmogorov–Smirnov (K–S) test that calculates the maximum distance K and the corresponding p value between two cumulative distribution functions, F(P0.1) and F(P10), by
where F(P0.1) and F(P10) are the cumulative distribution functions of a parameter P respectively for the best 0.1 % and best 10 % of the results. Following the approach of Ouyang et al. (2014), we grouped parameter identifiability into four categories: highly identifiable (K>0.25, p≤0.05), moderately identifiable (, p≤0.05), poorly identifiable (K<0.1, p≤0.05), and non-identifiable (p>0.05).
2.4 Identifiability analysis of specific sections of the BTC
The 100 best-performing parameter sets for each iteration were analysed with the DYNamic Identifiability Analysis (DYNIA, Wagener et al., 2002a) to address the role of model parameters in different sections of the BTC. Compared to the global identifiability analysis, the dynamic identifiability analysis evaluates the identifiability of a parameter on a moving window along the BTC. Following the approach of Wagener et al. (2002b), we used a window size of three time steps (∼1 min for E1 and E2 and ∼15 s for E3). The dynamic identifiability analysis identifies regions of the observed data that are identifiable (or not) to the investigated model parameter, and it can be used to test model structure, design specific experiments, and relate the model parameters to a specific simulated model response (Wagener et al., 2002a). The dynamic identifiability analysis yields the distribution of the likelihood as a function of the parameter values and the information content of the parameters over time. The information content is expressed as 1 minus the width of the 90 % confidence interval over the entire parameter range (Wagener et al., 2002a). A wide 90 % confidence interval indicates that various parameter values are associated with equally good performances resulting in low information content. Conversely, narrow 90 % confidence intervals and corresponding high information content values suggest that the best-performing parameters are contained in a relatively narrow range compared to the feasible range. To evaluate the degree of identifiability of a certain parameter in specific sections of the BTC, we grouped parameter identifiability in three categories: highly identifiable (information content ≥ 0.66), moderately identifiable (0.33 ≤ information content < 0.66), and poorly identifiable (information content < 0.33). We also specified sections of the BTC as follows: the “peak” of the BTC is the section of the BTC corresponding to a neighbourhood interval of three time steps ( min for E1 and E2 and s for E3) around the maximum observed concentration; “rising limb” and the “tail” are respectively the BTC sections before and after the peak. A detailed description of how to read the plots used to address the global identifiability analysis and a description of the dynamic identifiability analysis algorithm are given in Appendix A.
2.5 Iterative approach to achieve model identifiability
We simulated our tracer experiments with the ADE to avoid initial assumptions about advection–dispersion parameters that could affect the identifiability of transient storage parameters (Fig. 1). The RMSE value of the best-performing ADE parameter set is referred to as RMSEADE. After obtaining identifiable advection–dispersion parameters, we simulated the observed BTC with the TSM by sampling advection–dispersion parameters from a parameter range defined based on the ADE results, while the transient storage parameters were based on literature values (Table 1). This first TSM simulation over 115 000 parameter sets is referred to as the first TSM iteration.
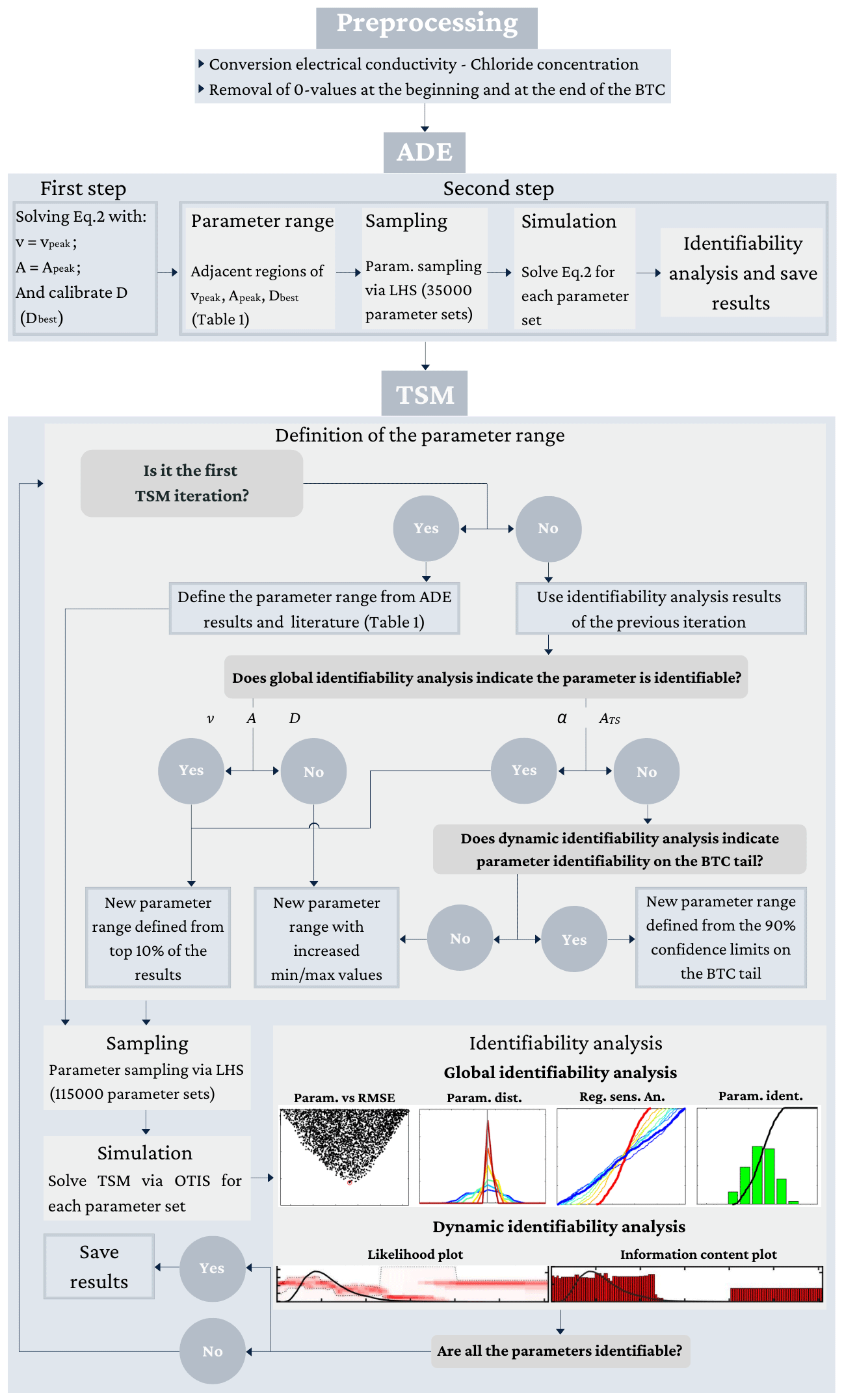
Figure 1Conceptual modelling workflow. The parameters have the following unit of measurement: velocity v (m s−1), cross-sectional area A (m2), longitudinal dispersion coefficient D (m2 s−1), exchange coefficient α (L s−1), and area of the transient storage zone ATS (m2).
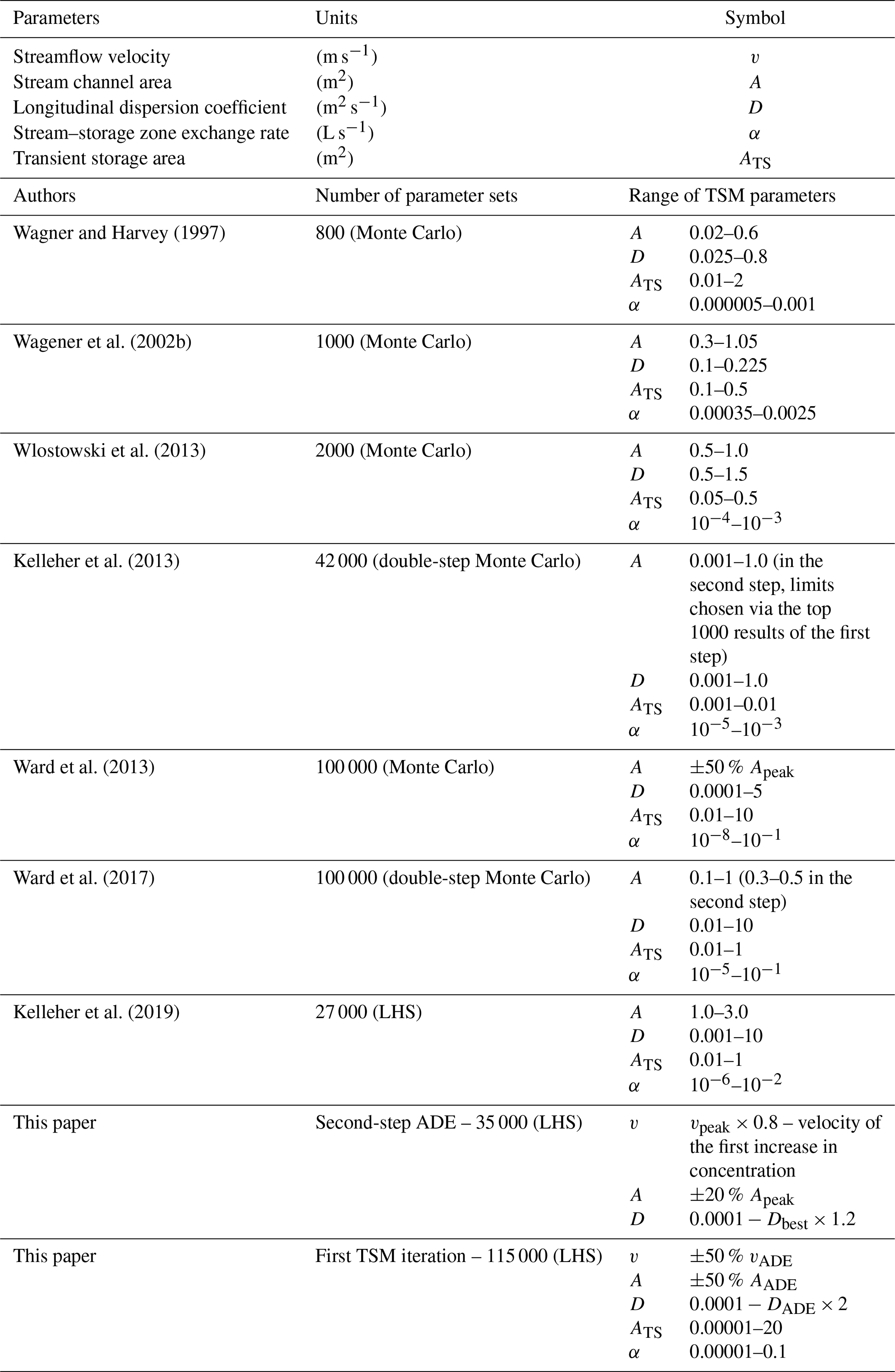
Table 1Parameter names, abbreviations, and units together with a summary of publications that address the identifiability of model parameters with random sampling approaches. We reported the used number of parameter sets and the parameter ranges, while in parentheses we reported the method used for the parameter sampling. “Double step” indicates that the sampling procedure was divided into two steps. In the first step, A varied across a broad range, and in the second step, it varied across a narrower range to cover the most sensitive range of the parameter domain. Each of the two steps investigated a number of parameter sets equal to half of the total number indicated in the table.
Similar to the Monte Carlo approach coupled with behavioural thresholds (Kelleher et al., 2013; Ward et al., 2017) starting from the result of the first TSM iteration, we simulated the three tracer experiments through a stepwise approach with n TSM iterations (n is the number of iterations, Fig. 1). The n TSM iterations sampled 115 000 parameter sets via LHS over parameter ranges defined by the results of the previous TSM iteration. That is, if the global identifiability analysis from the previous TSM iteration indicated that the investigated parameter is identifiable, the best 10 % of the results was used to define its parameter range in the successive TSM iteration (Fig. 1). When the identifiability criteria were not met, the parameter range investigated in the successive TSM iteration was increased, or, for the case of ATS and α, it was reduced based on the dynamic identifiability analysis result (information content above 0.66 on the BTC tail). This condition was chosen by the evidence that transient storage parameters ATS and α are often non-identifiable via global identifiability analysis (Camacho and González, 2008; Ward et al., 2013, 2017; Kelleher et al., 2019) but are identifiable on the tail of the BTC (Wagener et al., 2002b; Kelleher et al., 2013; Wlostowski et al., 2013).
While the first TSM iteration was conducted to investigate the identifiability of all the possible combinations in the feasible parameter range reported in the literature and from the results of the ADE (Table 1), the successive iterations excluded pairs of v and A whose product was outside the value of the discharge evaluated via dilution gauging ±10 %. This condition was chosen to respect results from Schmadel et al. (2010), who reported that the discharge error from the dilution gauging method is ≃8 %. The same approach (Fig. 1) was used also in the case where v was assumed fixed and equal to , where tpeak is the arrival time of the concentration peak. This choice was motivated by the fact that vpeak is commonly adopted as a value for velocity in many transient storage studies (Ward et al., 2013, 2017, 2018; Kelleher et al., 2013; Wlostowski et al., 2017). The modelling was finalized once every model parameter indicated that global identifiability via the enunciated criteria and the Kolmogorov–Smirnov test resulted in K>0.1 and p≤0.05 for each model parameter.
2.6 Number of parameter sets, parameter range, and identifiability of model parameters
For each TSM iteration, we randomly extracted N parameter sets and their corresponding results. We then computed the mean and standard deviation of the top 10 % of model results considering only the extracted subset of parameters N instead of the total of 115 000. N increased from 1000 to 115 000 with intervals of 1000 parameter sets. We then evaluated the change in model performance with the changing number of sampled parameter sets for the different TSM iterations for the three experiments. A continuous decrease in the mean and the standard deviation of the top 10 % results with increasing N shows that the number of chosen parameter sets clearly affects the performances of the random sampling approach for the investigated parameter range. In contrast, a constant mean and standard deviation of the top 10 % results over increasing N points to the inability of the model and modelling procedure to increase the performances with an increasing number of parameter sets for that investigated parameter range (Pianosi et al., 2015).
2.7 Comparison with an inverse modelling scheme and a Monte Carlo random sampling approach
We compared our results with both inverse modelling results (OTIS-P) and the most common random sampling approach for TSMs (OTIS-MCAT). OTIS-P is an inverse modelling scheme that minimizes the residual sum of squares between the modelled and observed BTC. The OTIS-P model estimates the best-fitting model parameter values and their identifiability via the 95 % confidence interval. We carried out multiple OTIS-P iterations starting from different initial parameter values to avoid a local minimum and interrupted the iterations when parameter values calibrated via OTIS-P changed by less than 0.1 % between subsequent runs (Runkel, 1998). OTIS-MCAT solves the TSM for the selected number of parameter sets and addresses their identifiability with a global identifiability analysis (Ward et al., 2017). Compared to our approach, OTIS-MCAT considers Monte Carlo parameter sampling instead of LHS and velocity equal to vpeak, and it does not foresee iterative parameter sampling from the results of dynamic identifiability analysis. Thus, here we indicate as “OTIS-MCAT results” the results we obtained after the first TSM iteration when v was assumed fixed and equal to vpeak.
2.8 Metrics and hydrologic interpretation of TSM results
The model parameter sets obtained from OTIS-P, OTIS-MCAT, and the proposed iterative TSM approach were used to compute some hydrologic metrics related to solute transport in streams. Here we computed the average distance a molecule travels in the stream channel before entering the transient storage zone (Ls, L; Mulholland et al., 1997):
The average time spent by a molecule in the transient storage zone (Tsto, T) is evaluated as (Thackston and Schnelle, 1970)
We computed the average water flux through the storage zone per unit length of the stream channel to interpret the magnitude of flux between the stream channel and the transient storage zone. Then we multiplied the obtained value by the reach length L to obtain the total water flux through the storage zone for the entire stream reach (qs, L3 T−1), modified from Harvey et al. (1996):
However, the metrics Ls, Tsto, and qs do not encompass the role of both advective transport and transient storage. Thus, we also calculated FMED (–) that accounts for the median travel time due to advection–dispersion and transient storage and for the travel time only due to advection and dispersion (Runkel, 2002):
Increasing values of FMED have to be interpreted as increasing the relative importance of the storage zone in the solute transport downstream (Runkel, 2002; Gooseff et al., 2013).
3.1 ADE parameters
The global identifiability analysis showed a clear peak of performance toward univocal values for v, A, and D for all three tracer experiments (E1, E2, E3; cf. Sect. 2.1, plots not shown). The model performances varied between RMSEADE equal to 0.9894 mg L−1 (E3, Q=22.79 L s−1) and RMSEADE equal to 1.9423 mg L−1 (E1, Q=2.52 L s−1).
3.2 TSM parameters
3.2.1 Identifiability of model parameters when velocity is considered as a calibration parameter
After the first TSM iteration, the global identifiability analysis indicated that v, D, and α parameters are identifiable with a unique performance peak (K of the K–S test is always >0.22 and p<0.05 for each tracer experiment). However, A and ATS appeared non-identifiable or poorly identifiable for the three investigated BTCs (Fig. 2, green dots, p value of the K–S test for ATS>0.05 for each tracer experiment).
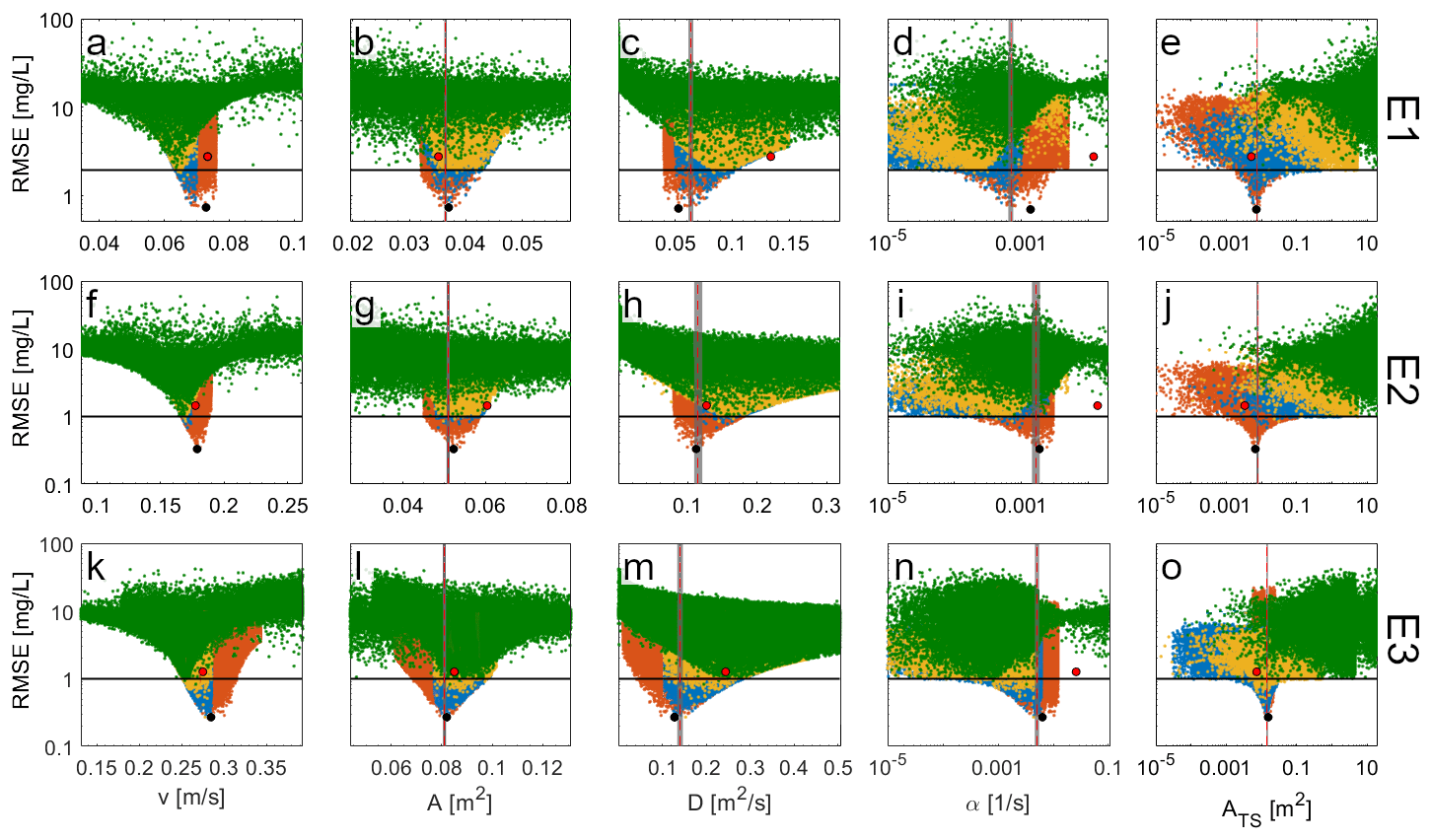
Figure 2Parameter values plotted against the corresponding RMSE values for the TSM results conducted for the tracer injections (a–e) E1, (f–j) E2, and (k–o) E3. (a–j) Green, yellow, blue, and orange dots indicate results respectively for the first, second, third, and fourth TSM iterations. (k–o) Green dots indicate results for the first and second TSM iterations, while yellow, blue, and orange dots indicate results respectively for the third, fourth, and fifth TSM iterations. Each TSM iteration was conducted via 115 000 parameter sets. The red dots indicate OTIS-MCAT results (the best parameter set after the first TSM iteration for v equals vpeak), while the black dots indicate the best-performing parameter value after the used iterative TSM approach. The horizontal black line indicates the RMSEADE (Table 2). The vertical dashed red line indicates OTIS-P results, while the 95 % confidence range for OTIS-P results is indicated via vertical grey areas.
The global identifiability of model parameters increased with increasing iterations. In the TSM iterations where ATS or α were poorly identifiable or non-identifiable (p value of the K–S test for ATS>0.05), TSM performances approached at best RMSEADE (Fig. 2, green, yellow and blue dots). After four (for E1 and E2) or five (for E3) TSM iterations, the parameter values plotted against the corresponding RMSE values showed a univocal increase in performance toward unique values for v, A, D, α, and ATS (Fig. 2, orange dots), and the RMSE of the best-performing parameter sets decreased below RMSEADE (Fig. 2, black horizontal line). Also, the CDF corresponding to the best 0.1 % of the results deviated from both the 1:1 line and from the parameter CDF corresponding to the best 10 % of the results (results not shown). These conditions, coupled with the K of the K–S test always being larger than 0.1 (average K for all the model parameters equal to 0.36 and p value < 0.05), indicated parameter identifiability and the finalization of the iterative TSM approach.
3.2.2 Identifiability of model parameters when velocity is set equal to vpeak
The global identifiability of model parameters increased considerably through the iterative model approach, also when velocity was not considered a calibration parameter. After the third TSM iteration, the best-performing parameter sets approached unique parameter values (Fig. 3, blue dots), and the CDF corresponding to the best 0.1 % of the results deviated from the 1:1 line and from the CDF of the best 10 % of the results (results not shown). These conditions, together with K of the K–S test always >0.25 and p value < 0.05 for each model parameter and tracer experiment, showed a clear increase in identifiability compared to the results after the first iteration (Fig. 3, green dots). The increase in parameter identifiability was followed by a sharp increase in model performance, with the best-performing parameter sets at the end of the iterative approach having RMSE values below RMSEADE for all the investigated BTCs (Fig. 3, blue dots and black line).
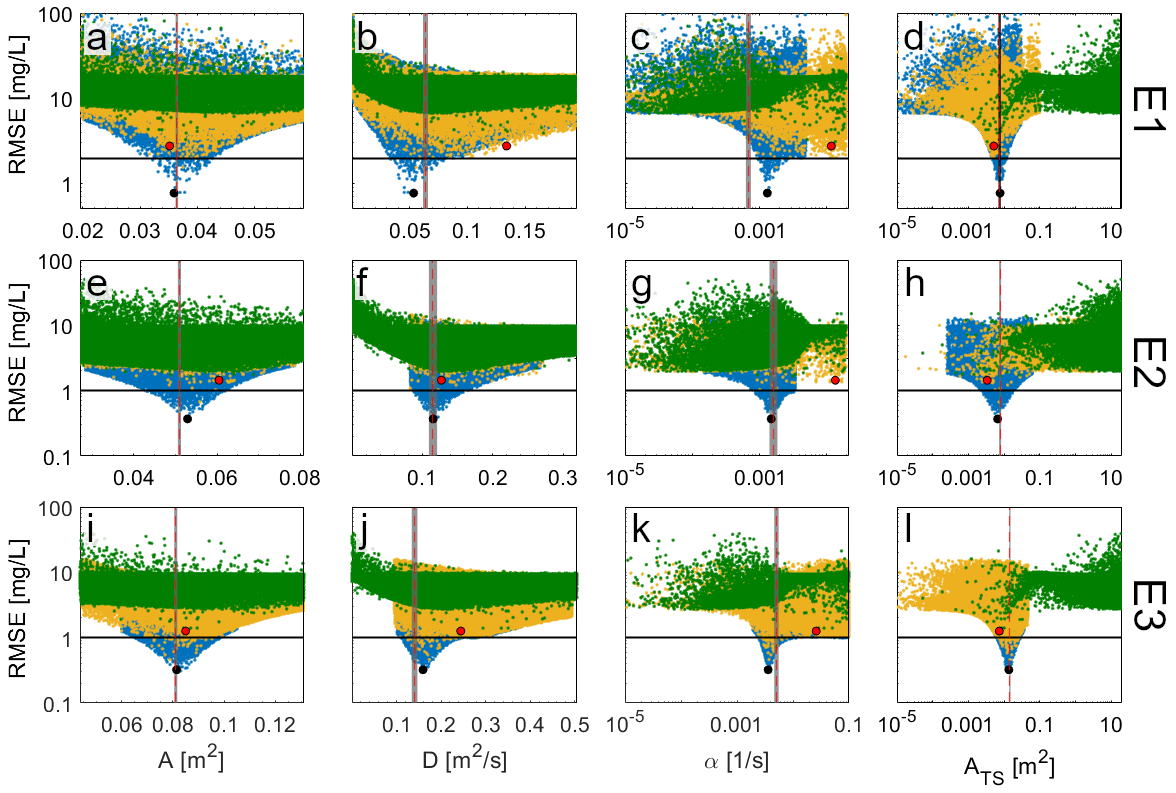
Figure 3Same as Fig. 2 but reporting TSM results when velocity was considered equal to vpeak.
3.3 Dynamic identifiability analysis
3.3.1 Dynamic identifiability analysis when velocity is considered as a calibration parameter
The dynamic identifiability analysis provided clearer insights into the identifiability of the model parameters for different sections of the BTC compared to the global identifiability analysis (plots shown only for E1). After the first TSM iteration, v and α proved to be the most identifiable and informative parameters on the rising limb, the peak, and the tail of the BTC (information content > 0.66; Fig. 4a, b, g and h). A and D were mostly identifiable and informative during the rising limb and the tail of the BTC (Fig. 4c–f). ATS was non-identifiable and poorly informative in most sections of the BTC (information content < 0.33; Fig. 4i and j). However, the identifiability of ATS increased on the tail of the BTC, where the information content was above 0.66 for ATS between 0.77 and 5.35 m2 (Fig. 4i and j). Results from E2 and E3 showed that α and ATS were highly identifiable (information content > 0.66) for smaller sections of the tail of the BTC when the experiments were conducted at higher discharge stages (information content of ATS>0.66 for 51 % of the tail of the BTC for E1, for 23 % for E2, and 19 % for E3, results not shown).
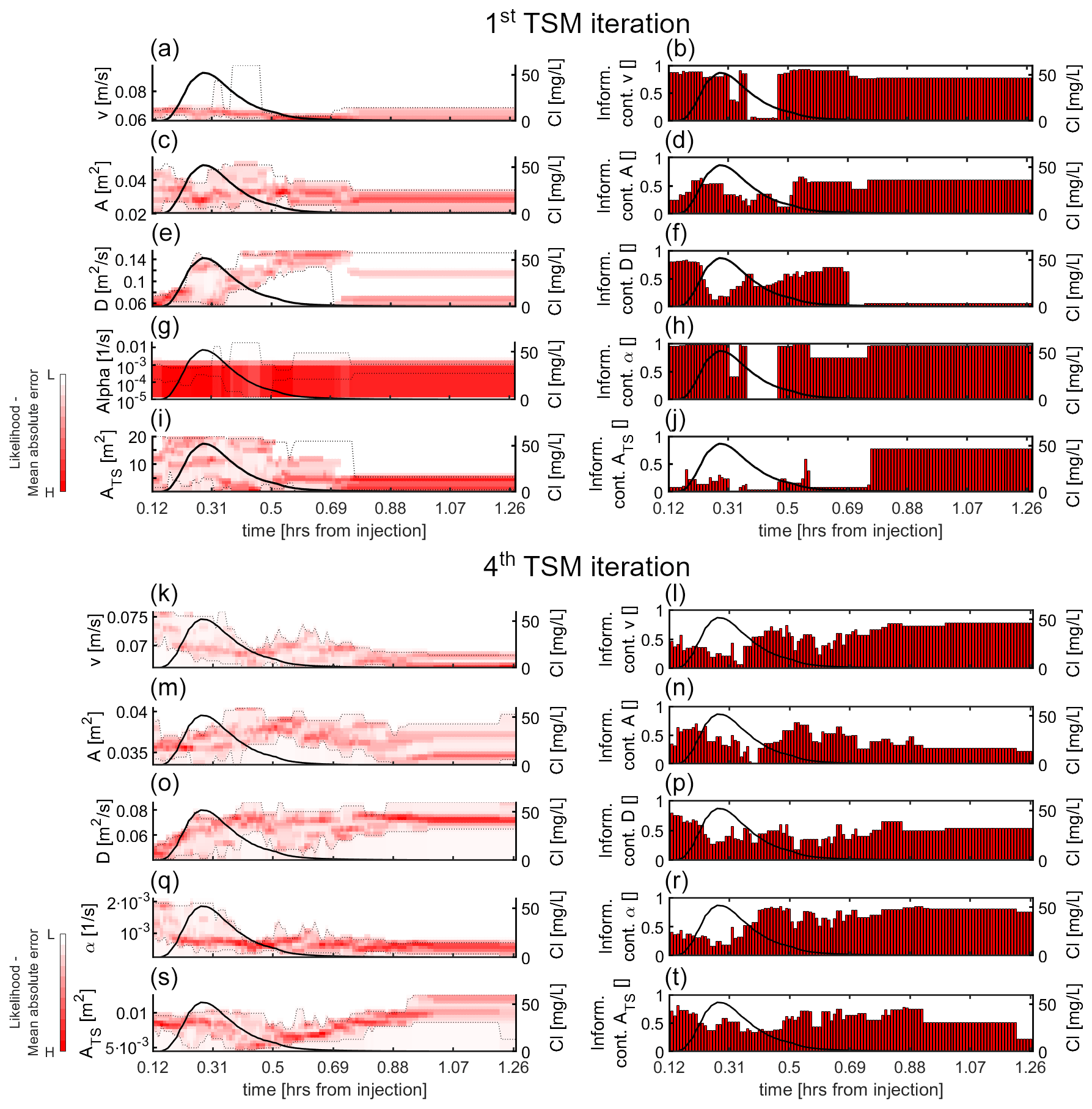
Figure 4Dynamic identifiability analysis of model parameters for E1 when v was considered as a varying model parameter. Results report for the (a–j) first TSM iteration and the (k–t) last TSM iteration. (a, c, e, g, i, k, m, o, q, s) Likelihood distribution as a function of parameter values at each time step. Black lines indicate the observed BTC, and dashed black lines indicate the 90 % confidence limits. Panels (b, d, f, h, j, l, n, p, r, t) indicate parameter information content (red bars) at each time step, while the black lines indicate the observed BTC.
The dynamic identifiability analysis for the last TSM iteration showed that the advection–dispersion parameters were important in controlling the rising limb and the tail of the BTC (Fig. 3k–p), while α was particularly important for controlling the tail (Fig. 3q and r) and ATS for controlling the rising limb and the tail of the BTC (Fig. 3s and t). Dynamic identifiability analysis after the last TSM iteration for E2 and E3 showed comparable results (not shown).
3.3.2 Dynamic identifiability analysis when velocity is set equal to vpeak
After the first TSM iteration, the dynamic identifiability analysis indicated that A was poorly identifiable on the entire BTC (results reported only for E1, Fig. 5a and b), while D was moderately identifiable (information content between 0.66 and 0.33) on the rising limb and the tail of the BTC (Fig. 5c and d). ATS displayed high information content on the entire BTC (Fig. 5g and h), with a narrow confidence interval on the tail of the BTC for values between 0.0014 and 0.43 m2. α was non-identifiable on the majority of the BTC (Fig. 5e); however, it showed high information content for values between 7.06−5 and 0.0074 L s−1 at the tail of the BTC (Fig. 5f). The dynamic identifiability analysis for the BTC of E2 and E3 yielded similar results, with narrow confidence intervals for both ATS and α on the tail of the BTC and no clear trend between information content and discharge (results not shown).
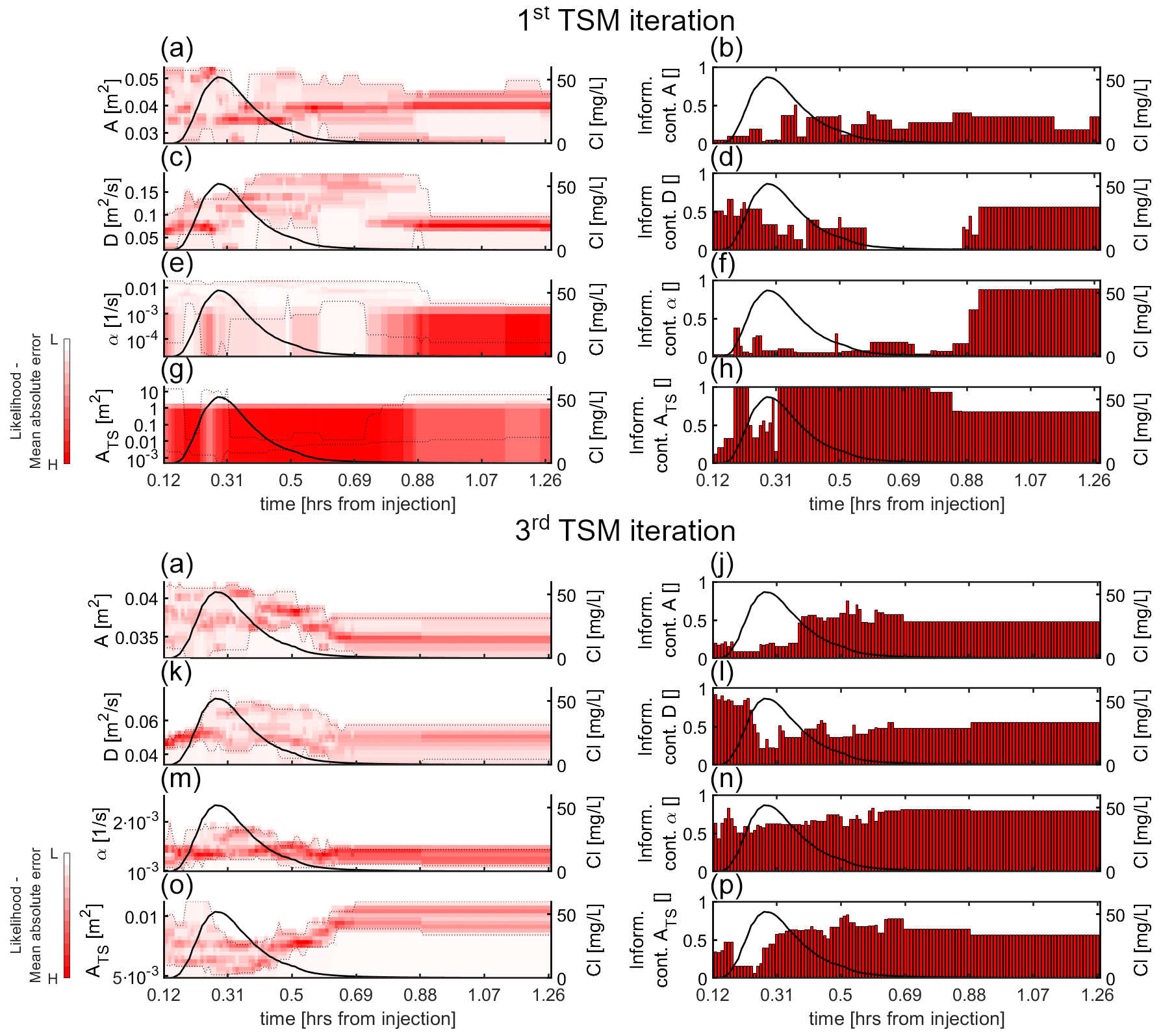
Figure 5Same as Fig. 4 but reporting dynamic identifiability results for E1 when v was set equal to vpeak.
The dynamic identifiability analysis for the last TSM iteration of E1 indicated that A and D control the tail and the rising limb of the BTC (Fig. 5i–l). α acted both the rising limb and the tail of the BTC (Fig. 5m and n), and ATS controlled mostly the tail of the BTC (Fig. 5o and p). For E2 and E3, results after the last TSM iteration showed lower information content of ATS on the tail of the BTC for increasing discharge stages compared to E1, while the information content of α was above 0.33 on the entire BTC (results not shown).
3.4 Role of the used parameter range and the number of parameter sets in the identifiability of model parameters
When a rather wide parameter range was used (first TSM iteration, green dots, Fig. 2), the performance of the global identifiability analysis was strongly dependent on the chosen number of sampled parameter sets. This can be derived from the strong decrease in the mean and the standard deviation of the top model results with the number of sampled parameter sets N (results reported only for E1, Fig. 6a). Also, for less than 97 000 parameter sets, the error between model performance using N parameter sets and using 115 000 parameter sets was always above 5 % (vertical black lines, Fig. 6a).
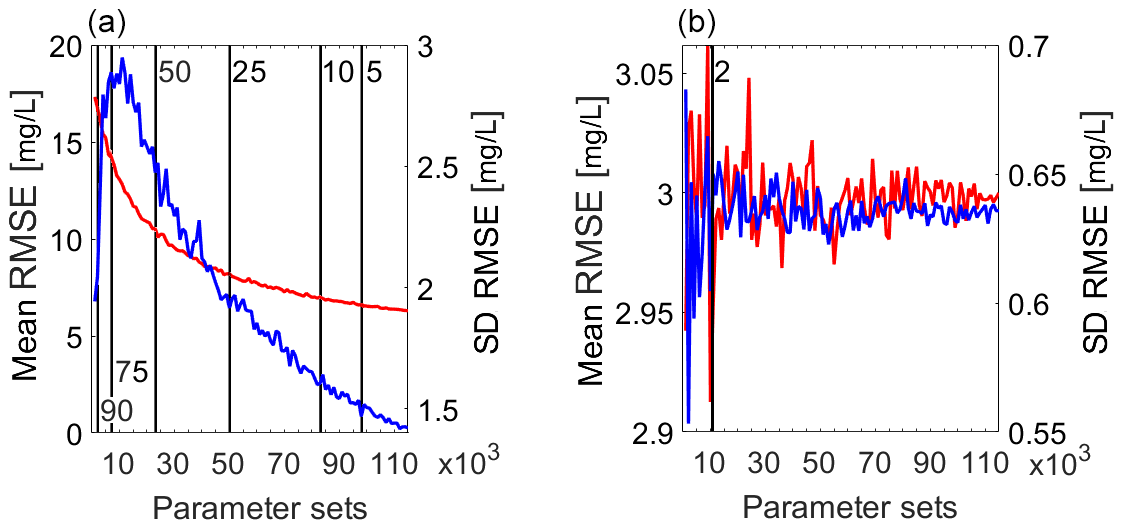
Figure 6Mean (red lines, left axes) and standard deviation (blue lines, right axes) for RMSE values relative to the top 10 % of the modelling results as a function of the number of parameter sets used in the TSM. The results are reported for the (a) first TSM iteration and the (b) last TSM iteration (E1). Vertical black lines indicate the number of parameter sets needed to have the shown percentage difference between the mean RMSE value calculated at the indicated number of parameter sets and at 115 000 parameter sets. For example, in plot (a) only using at least 50 000 parameter sets, there is less than a 25 % difference in the top 10 % RMSE values compared to results using 115 000 parameter sets.
Our results showed that TSM results were poorly dependent on the sampled number of parameter sets when the model performance was studied for a narrow parameter range around the peak of the performance (last TSM iteration, orange dots, Fig. 2). This was derived by the rather constant mean and standard deviation of the top model results with the number of subset N. Also, for a number of parameter sets N above 11 000, the error between model performance using N parameter sets and using 115 000 parameter sets was always below 2 % (vertical black line, Fig. 6b).
3.5 Comparison with the OTIS-P and OTIS-MCAT results
Compared with results from our identifiability analysis, outcomes of OTIS-P were consistent with the best parameter sets obtained at the end of the iterative modelling approach (Table 2). Results from OTIS-P showed parameter identifiability with a narrow 95 % confidence range for the ATS and A, while D and α parameters were estimated with lower identifiability due to a larger 95 % confidence range (Figs. 2 and 3). The parameter sets obtained via OTIS-P (Figs. 2 and 3, red vertical dashed line) were approaching the best-fitting results obtained at the end of the used iterative approach, regardless of whether flow velocity was considered as a calibration parameter (Fig. 2) or was considered equal to vpeak (Fig. 3, Table 2).
Table 2Summary of the TSM results. OTIS-MCAT results refer to the case v=vpeak without any successive modification of the parameter via dynamic identifiability analysis results. “Iterative TSM” indicates the best parameter sets obtained after the iterative TSM approach presented in Fig. 1 and applied for the cases v considered as a calibrated parameter (v = calib.) and when it was considered fixed and equal to vpeak (v=vpeak). The best TSM results are indicated in bold font.
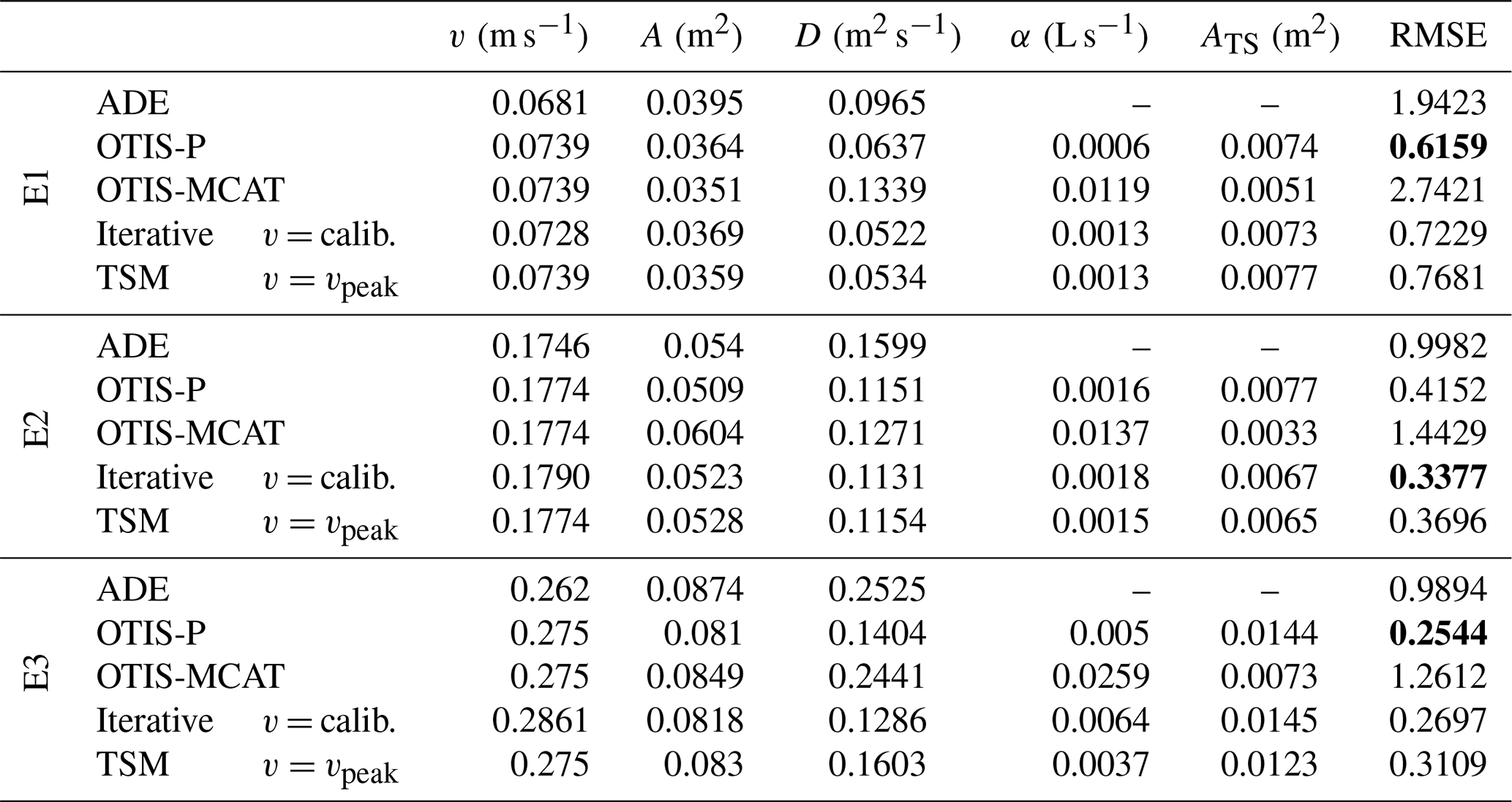
The results of OTIS-MCAT showed low p values for each model parameter after the K–S test (p<0.05, K>0.12), indicating parameter identifiability. However, compared to our results at the end of the iterative modelling approach, the global identifiability analysis of the OTIS-MCAT showed that the distribution of model parameters did not converge towards univocal and optimal parameter values, suggesting that model parameters were rather non-identifiable, with the TSM performing less than the ADE (Fig. 3, green dots).
3.6 Variation of transport metrics with increasing identifiability of model parameters
The evaluated transport metrics showed high uncertainty as long as the model parameters were poorly identifiable or non-identifiable (Figs. 2 and 3, green and yellow dots). This was particularly evident after the first and second TSM iterations, when the 100 best-performing parameter sets showed Tsto values spanning over 9 orders of magnitude (Fig. 7d–f), while both Ls and qs spanned over 3 orders of magnitude (Fig. 7a–c and g–i). When the model parameters were poorly identifiable, the values of the transport metrics showed clear differences between simulations that were obtained with streamflow velocity as a calibration parameter (Fig. 7, blue boxplots, first TSM iteration) and between simulations with streamflow velocity set equal to vpeak (OTIS-MCAT, Fig. 7, orange boxplots, first TSM iteration). When v was considered as a calibration parameter, the best-performing parameter sets after the first TSM iteration showed a non-negligible role of transient storage in solute transport for the investigated tracer experiments. This was indicated by the values of Ls (from ∼2 km for E1 to ∼69 m for E3), by the simulated exchange flux qs (from 0.06 L s−1 for E1 to 8.8 L s−1 for E3), and by the solute residence time in the storage zone Tsto (ranging from ∼140 d for E1 to ∼15 h for E3). Clearly different values for the transport metrics were obtained when v was set equal to vpeak. In this case, the results after the first TSM iteration showed a non-negligible exchange flux of the active stream with the transient storage zone (qs ranged from ∼23 L s−1 for E1 to ∼121 L s−1 for E3), a rather similar Ls for the three tracer experiments (∼10 m), and a Tsto decrease between the experiments with increasing discharge (from ∼12 s for E1 to ∼3 s for E3).
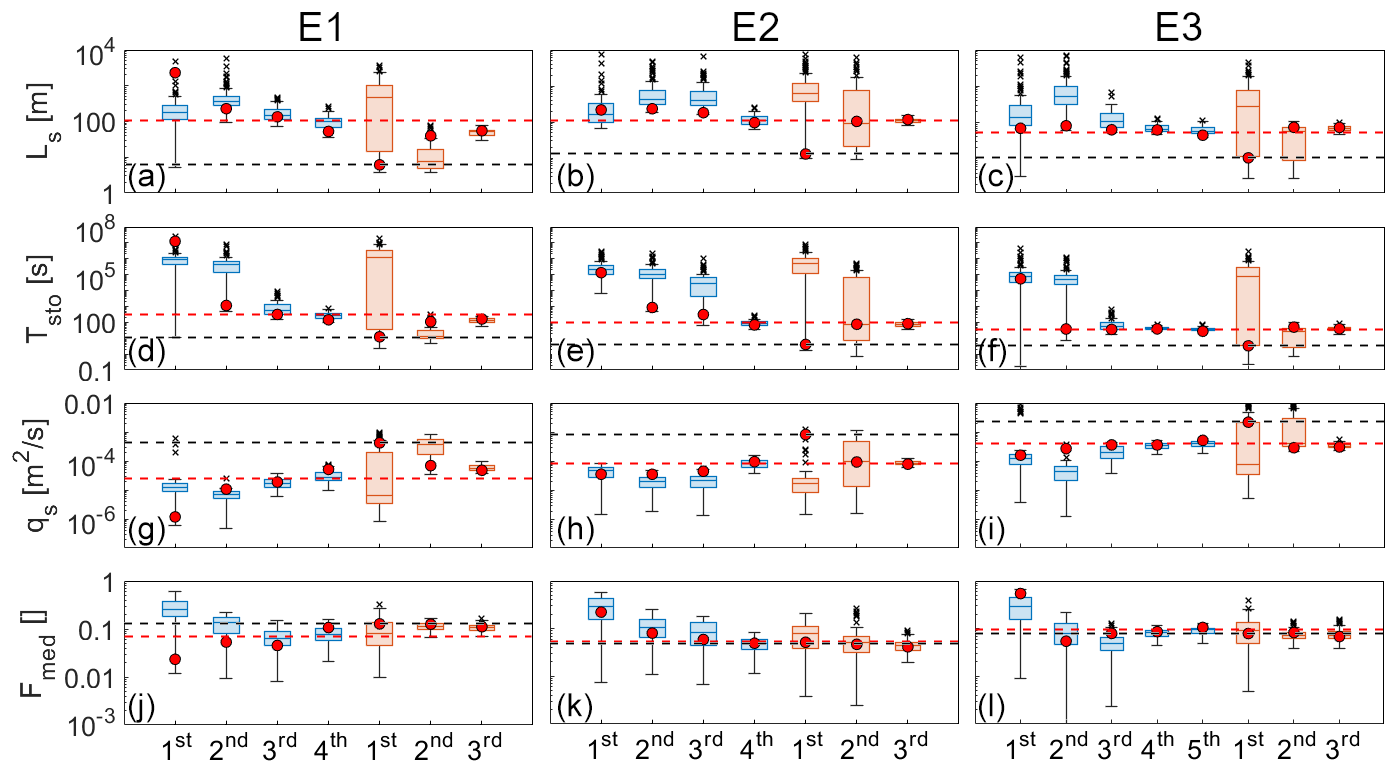
Figure 7Boxplots of the investigated transport metrics for the 100 best parameter sets for the three simulated experiments. (a–c) Ls, (d–f) Tsto, (g–i) qs, (j–l) Fmed. Results are reported for (a, d, g, j) E1, (b, e, h, k) E2, and (c, f, i, l) E3. On the x axis, we indicated the nth TSM iteration. Blue and orange boxplots indicate results when velocity was a varying model parameter and when it was kept fixed and equal to vpeak respectively. Red dots indicate the transport metric values obtained via the parameter sets with a lower RMSE. The red and black horizontal dashed lines indicate respectively the transport metric obtained using the OTIS-P results and OTIS-MCAT results (the first TSM simulation when velocity was kept fixed and equal to vpeak).
However, when the model parameters were identifiable, the transport metrics converged toward constrained values and were consistent with OTIS-P results (Fig. 7). This was achieved with a calibrated and fixed (as in the OTIS-MCAT model) streamflow velocity. Results of the last TSM iteration showed that the investigated transport metrics have low dispersion around the median and that the median almost coincides with the result of the best-performing parameter set (Fig. 7, red dots). When all model parameters were identifiable for each of the three tracer experiments, the transport metrics showed increasing qs (from ∼2.7 L s−1 for E1 to ∼23 L s−1 for E3), increasing LS (from ∼50 m for E1 to ∼100 m for E3), and decreasing Tsto (from ∼150 s for E1 to ∼33 s for E3) with increasing mean discharge of the experiments (from E1 to E3). Fmed did not change widely between the TSM iterations since the median of the best-performing 100 parameter sets always varied between 0.04 and 0.2 (Fig. 7j–l). However, together with qs, LS, and Tsto transport metrics, the dispersion of Fmed values around the median decreased with increasing identifiability of model parameters.
4.1 The role of velocity in random sampling approaches for TSMs
Our results showed that v interacts with α and ATS in transient storage models. This was particularly evident when v was considered as a calibration parameter, and the non-identifiability of ATS was coupled with identifiable v and α (Fig. 2, green and yellow dots). In contrast, ATS was found to be identifiable and α to be non-identifiable when v was fixed equal to vpeak (Fig. 3, yellow dots). It is known that a separate evaluation of the advection–dispersion parameters from the transient storage parameters can result in a misestimation of transient storage parameters due to the high parameter interaction (Knapp and Kelleher, 2020). Several studies addressed the identifiability of model parameters, yet no study so far has investigated the role of the flow velocity in the identifiability of α or ATS, and studies rely on a flow velocity equal to vpeak in random sampling approaches for TSMs (Ward et al., 2013, 2017, 2018; Kelleher et al., 2013; Wlostowski et al., 2017). The practice of setting v equal to vpeak in past studies was justified by the notion that vpeak can be considered a reasonably good approximation for the advection process in the stream channel (Ward et al., 2013; Wlostowski et al., 2017) and by the modelling advantage that assuming v equals vpeak would reduce model dimensionality (Knapp and Kelleher, 2020). While reducing the number of model parameters is advantageous for reduced model dimensionality, considering v as a calibration parameter is a needed testing strategy in TSMs. This is because measurement uncertainty is inevitable in determining discharge or flow velocity, and thus we do not know how big the effect of measurement uncertainty is on model performance, especially considering parameter interaction. Also, constraining the advection–dispersion parameters A and D already proved to affect the identifiability of the other model parameters (Lees et al., 2000; Kelleher et al., 2013; Ward et al., 2017), but no study assessed the role of velocity in parameter identifiability.
Our results provide valuable guidance for future studies addressing parameter identifiability in TSMs. Specifically, our results support the current practice of considering velocity fixed and equal to vpeak, especially when research aims at evaluating the distribution of “behavioural” parameter sets in TSMs (i.e. parameter sets satisfying certain performance thresholds). This is due to the fact that using velocity as a calibration parameter leads to the same parameter identifiability compared to the case when velocity is considered fixed (Figs. 2 and 3, Table 2). Yet setting velocity equal to vpeak requires a considerably lower amount of computational power due to the lower degrees of freedom of the TSM. However, when research aims to evaluate the control of the model parameters on the shape of the BTC, our results suggest that increasing the model complexity by considering velocity as a varying model parameter can offer more detailed insights into the role of advection–dispersion processes in the tail of the BTC and of the transient storage parameters in the rising limb and peak of the BTC (Figs. 4 and 5). Indeed, our results highlighted how assuming that v equals vpeak led to a stronger influence of α and a weaker influence of ATS on the BTC compared to the case when v is considered as a calibration parameter. Also, our dynamic identifiability analysis underestimated the role of A and ATS in the rising limb and peak of the BTC and overestimated the role of D and α in the rising limb of the BTC for the case when v equals vpeak compared to the case when v was a calibration parameter (Figs. 4 and 5).
The assumption used in previous work of streamflow velocity equalling vpeak implies that vpeak should encompass the effect of advection on the entire BTC or at least in the rising limb and peak of the BTC (Ward et al., 2013, 2018; Kelleher et al., 2013; Wlostowski et al., 2017). However, when v was used as a calibration parameter, our results showed that v is one of the least meaningful parameters for simulating the peak of the BTC at low discharge (Fig. 4k and i), while higher information content for v is obtained at higher discharge rates for values larger than vpeak at the peak of the BTC (dynamic identifiability plots not shown).
4.2 Control of model parameters on the rising limb, the peak, and the tail of the BTC
The results of our dynamic identifiability analysis showed that both the advection and dispersion and the transient storage parameters control solute arrival time and solute retention in stream channels. This outcome is in contradiction with the common interpretation of model parameters, where it is assumed that the advection–dispersion parameters control the solute arrival time, while transient storage parameters are assumed to control the tail of the BTC (Bencala, 1983; Bencala and Walters, 1983; Runkel, 2002; Smith, 2005; Bencala et al., 2011). Following this common interpretation of the role of model parameters in the BTC, some authors decomposed the BTC into an advective part and a transient storage part (Wlostowski et al., 2017; Ward et al., 2019). This decomposition allowed them to quantify the role of advection and dispersion and transient storage embedded in the BTC. However, this modelling strategy also implicitly assumes a negligible role of advection–dispersion parameters in the tail of the BTC and of transient storage parameters in the rising limb and peak of the BTC, which is not consistent with our findings (Figs. 4, 5 and 8).
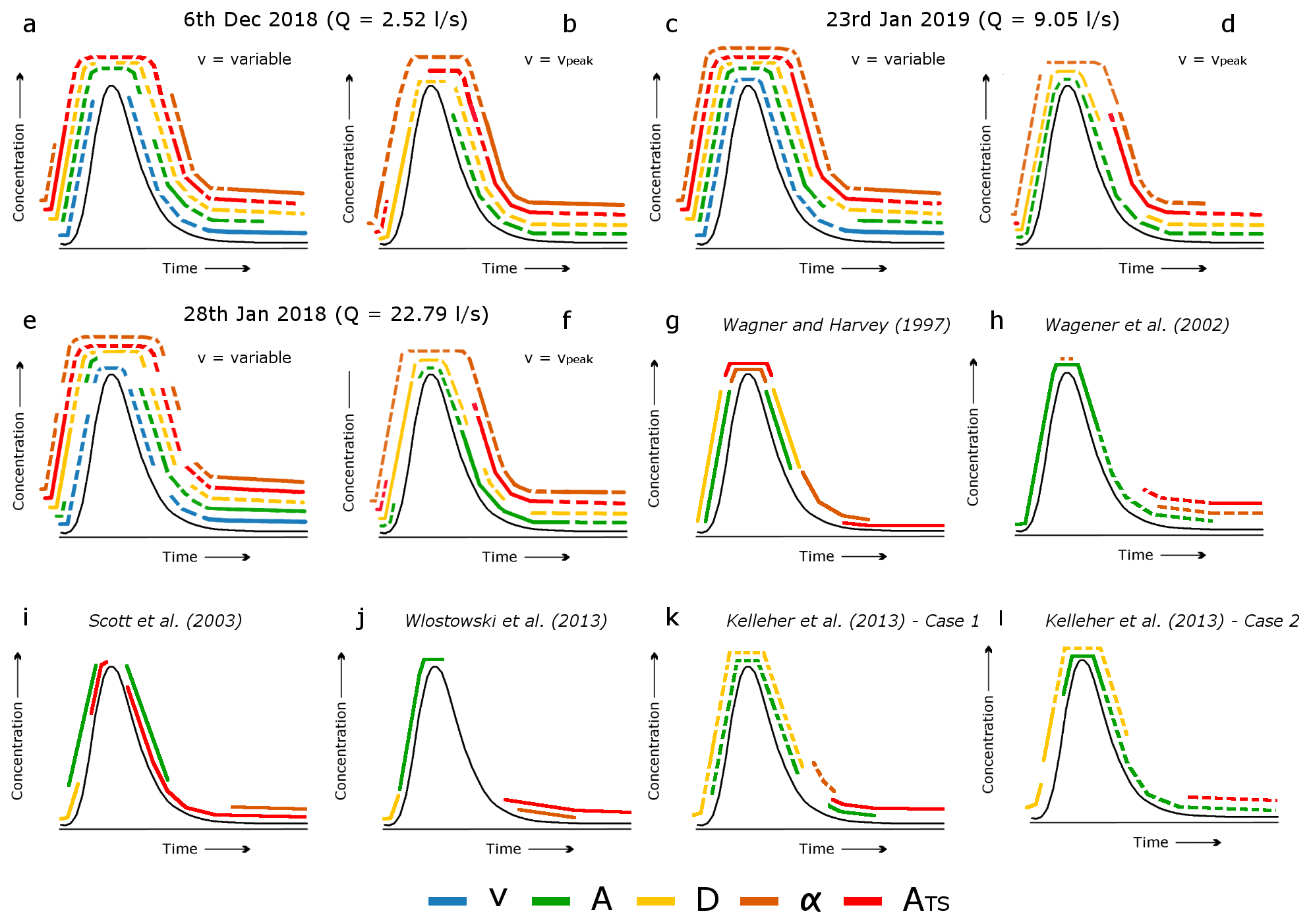
Figure 8Qualitative plots of the TSM parameter influence different sections of the BTC. (a, b) Qualitative parameter information content on the BTC for E1, (c, d) E2, and (e, f) E3. In plots (a–f) solid lines indicate an information content above 0.66, while dashed lines indicate an information content between 0.33 and 0.66. (g) Wagner and Harvey (1997): parameter influence described via sensitivity evaluation (cf. p. 1733, Wagner and Harvey, 1997), and therefore the parameter influence is described using only solid lines. (h) Wagener et al. (2002b): plot (h) has been modified from Fig. 7 in Wagener et al. (2002b) in order to fit our 0.66 and 0.33 threshold classification in terms of information content. (i) Scott et al. (2003): parameter influence described via dimensionless sensitivity (cf. Table 1 in Scott et al., 2003), and therefore the parameter influence is described using only solid lines. (j) Wlostowski et al. (2013): plot (j) describes the parameter influence after the dynamic identifiability analysis; however, information content plots were not reported by the authors, and therefore the solid lines indicate the areas for the best-performing parameters as indicated in Fig. 2 of Wlostowski et al. (2013). (k) Kelleher et al. (2013) for the case of a dispersive mountain stream (Case 1) and (l) Kelleher et al. (2013) for the case of a small low-flow mountain stream (Case 2). Plots (k) and (l) indicate by solid and dashed lines whether the parameters influence the model output by itself or through interactions (cf. Sect. 6.1, Kelleher et al., 2013).
Several studies addressed how different model parameters affect the shape of the BTC and showed partly similar but also contrasting outcomes to our findings (Fig. 8g–l, Wagner and Harvey, 1997; Wagener et al., 2002b; Scott et al., 2003; Wlostowski et al., 2013; Kelleher et al., 2013). Past studies found that the rising limb of the BTC was controlled by the stream channel area A alone (Wagener et al., 2002b), by the combination of A and the longitudinal dispersion coefficient D (Wagner and Harvey, 1997; Wlostowski et al., 2013; Kelleher et al., 2013), or by A, D, and ATS (Scott et al., 2003). The peak of the BTC was found to be controlled by advection–dispersion parameters in most past TSM applications (Wagener et al., 2002b; Wlostowski et al., 2013; Scott et al., 2003; Kelleher et al., 2013). However, Wagner and Harvey (1997) reported a non-negligible role of the transient storage parameters α and ATS in controlling the arrival time of the peak concentration (Fig. 8g). Eventually, while the majority of the studies found the transient storage parameters α and ATS to control the tail of the BTC (Wagner and Harvey, 1997; Scott et al., 2003; Wlostowski et al., 2013), results reported by Wagener et al. (2002b) and by Kelleher et al. (2013) highlight the role of the stream channel area A in controlling a large portion of the tail of the BTC.
The observed identifiability of model parameters in different sections of the BTC in past work and the differences compared to our findings (Fig. 8a, c and e) might be driven by different physical settings or discharge conditions of the study sites, by the methods used to account for parameter identifiability, by the parameter sampling procedure, or by the strategy used to obtain the best-fitting parameter sets (Wagner and Harvey; 1997; Scott et al., 2003; Kelleher et al., 2013). For example, the identifiability of the TSM to α and ATS is expected to increase for dispersive streams and alluvial stream channels compared to mountain reaches with low or null hydrologic exchange with the hyporheic zone (Kelleher et al., 2013). However, our analysis also suggests that the different results on the importance of model parameters for certain sections of the BTC (Fig. 8) could be driven by the selected random sampling approach and the non-identifiability of model parameters.
Plots of the parameter values against the corresponding objective function in Wagener et al. (2002b) and the regional sensitivity analysis in Wlostowski et al. (2013) do not indicate parameter identifiability for ATS, D and α. These results together with our identifiability plots when model parameters were poorly identifiable (Figs. 2 and 3, green and yellow plots) suggest that the range and the number of the parameter sets chosen in different studies could have been insufficient to obtain global sensitivity and identifiability of D, ATS, and α parameters. Similar to the results by Wagener et al. (2002b) and Wlostowski et al. (2013), our dynamic identifiability analysis showed no influence of ATS on the majority of the BTCs when ATS was non-identifiable (Fig. 4i and j).
Compared to our results, the different roles of the model parameters in controlling the shape of the BTC in previous studies (e.g. Kelleher et al., 2013) could be driven by the different approaches used for evaluating the sensitivity (i.e. Sobol' sensitivity analysis). However, our results suggest that the number of parameter sets (42 000) selected by Kelleher et al. (2013) might not have been sufficient to obtain identifiability of the model parameters with the rather wide parameter range chosen for their Monte Carlo sampling (Table 1). Results by Kelleher et al. (2013) are very similar to our TSM iterations for cases where α was non-identifiable (v equals vpeak, Fig. 3 yellow dots, dynamic identifiability plots not shown). We also demonstrated that our results after the first and second TSM iterations are not sufficient for interpreting the transient storage process because of the non-identifiability of the model parameters and the low model performances (RMSE ≥ RMSEADE (Fig. 3a–l, green and yellow dots).
This study offers significant insights into understanding which model parameters influence the shape of the BTC, suggesting that only behavioural parameter sets should be considered in models aiming to understand the control of model parameters on the rising limb, peak, and tail of the BTC. Future work should address the interaction of model parameters on controlling different sections of the BTC for more complex model formulations (e.g. TSM with two or several transient storage zones, Choi et al., 2000; Bottacin-Busolin et al., 2011).
4.3 On the importance of parameter range, parameter sets, and challenges associated with parameter identifiability in TSMs
The applied iterative approach was effective in drastically improving parameter identifiability with the increase in TSM iterations. The identifiability of parameters in TSMs is commonly studied via random sampling approaches using between 800 and 100 000 parameter sets sampled from a parameter range spanning several orders of magnitude (Table 1). Despite a large number of parameter sets used in previous studies, model parameters were found to be identifiable only in a few studies (Ward et al., 2017, 2018), while at least one model parameter was found to be non-identifiable in the majority of current TSM studies. Many authors found identifiable ATS coupled with non-identifiable α (Camacho and González, 2008; Kelleher et al., 2013; Wagener et al., 2002b; Wlostowski et al., 2013), while other TSM applications found α to be identifiable coupled with non-identifiability for ATS (Kelleher et al., 2019) or α and ATS to be both non-identifiable (Camacho and González, 2008; Ward et al., 2013, 2017). Our results offer a possible explanation for the observed non-identifiability of model parameters in published work. Our study demonstrated that it is unlikely to reach parameter identifiability via a random sampling approach using less than 100 000 parameter sets when a rather wide range of model parameters is used (Table 1, Fig. 6a). While the range and the order of magnitude of advection–dispersion parameters can be estimated by using the ADE, the ranges where α and ATS are identifiable are not known a priori, and random sampling approaches need to target a parameter range wide enough to capture the distribution of transient storage parameters in their entire feasible range (Ward et al., 2013, 2017; Kelleher et al., 2013). We proved here that investigating the most identifiable parameter range is more effective for achieving parameter identifiability than just using a large number of parameter sets on a wide parameter range (Fig. 6). The peak of performance for the transient storage parameters can be so narrow that it can be missed by the random sampling approach or by only a low number of selections when the sampled parameter range spans many orders of magnitude. Similar conclusions have been obtained by Ward et al. (2017), who found by using the OTIS-MCAT model via 100 000 parameter sets that the model parameters were identifiable only for one of the three investigated BTCs. Other studies coupled random sampling approaches with behavioural thresholds to reduce parameter non-identifiability, yet this was done to constrain only the range of A (Kelleher et al., 2013; Ward et al., 2017). Here, we demonstrated the importance of the parameter range over the number of parameter sets in random sampling approaches for TSMs (Fig. 6). The adopted identifiability analysis was effective in finding behavioural parameter sets after a few iterations regardless of the modelling approach used (OTIS-MCAT as well as considering v as a calibration parameter). Of particular interest is our finding that high information content (>0.66, e.g. Figs. 4j and 5f) of α and ATS on the tail of the BTC after the dynamic identifiability analysis can be used to reduce the parameter range in successive TSM iterations. This result is in agreement with the recent findings of Rathore et al. (2021), who found the tail of the BTC to contain fundamental information for transient storage processes and the parameters describing it.
The adopted iterative approach allowed us to achieve parameter identifiability and obtain physically realistic transport metrics. However, this approach is based on the specific objective function used (RMSE) and on the subjective thresholds to control the refinement of the parameter range for successive iterations (top 10 % results for the global identifiability analysis and information content > 0.66 for the dynamic identifiability analysis). Future work should explore the impact of the selection of the thresholds and different objective functions on the physical realism of the modelling results and the identifiability of the parameters.
The applied iterative approach is foremost a tool for achieving parameter identifiability by investigating the entire range of feasible parameter values via existing identifiability tools (global identifiability analysis and dynamic identifiability analysis). The larger amount of time and computational power required by the adopted identifiability analysis compared to the rather straightforward application of OTIS-P paid off in terms of completeness of results and granted a more comprehensive view of the possible modelling outcomes on the feasible parameter range. Also, compared to the standard random sampling approach, the identifiability analysis used in the present work proved effective in iteratively constraining the parameter range to reduce the dimensionality of the model, eventually providing both identifiable model parameters and optimal parameter sets with model performances approaching (or even outperforming) calibrated results via inverse modelling (Table 2).
Our simulations with OTIS-P resulted in excellent model performances for the investigated BTCs, with low RMSE values and with calibrated model parameters comparable to the behavioural parameter populations obtained via our global identifiability analysis (Figs. 2 and 3). While the obtained performances of the OTIS-P calibration are certainly specific to the investigated BTCs, the use of OTIS-P alone would not have provided enough information to address the reliability of the obtained model parameters. This, in turn, would have raised concerns about the credibility of the transport metrics obtained, eventually compromising the robustness of the derived physical process involved at the study site. Compared to random sampling approaches coupled with global identifiability analysis, inverse modelling approaches are often considered not meaningful for interpreting modelling outcomes (Ward et al., 2013; Knapp and Kelleher, 2020). This is because parameters calibrated via inverse modelling might be non-identifiable despite an overall good model performance (Kelleher et al., 2019) and because identifiability analysis informs behavioural parameter sets, which is a preferable and more informative outcome for hydrological models than a single set of parameter values (Beven, 2001; Wagener et al., 2002a). Thus, our identifiability analysis over different investigated parameter ranges can offer an explanation about why in past studies identifiability analysis over a probably too large parameter range indicated non-identifiability and a lack of convergence with OTIS-P results (Ward et al., 2017).
Eventually, even if random sampling approaches are generally considered more informative than the inverse modelling approach (Ward et al., 2013, 2017, 2018; Knapp and Kelleher, 2020), our results indicate that random sampling outcomes that show non-identifiability of transient storage parameters should not be used for process interpretation in TSMs. This was evident from TSM iterations showing non-identifiability of α and ATS, with the best model performances approaching the RMSEADE (Figs. 2 and 3, black line), indicating an underestimation of the transient storage process with the optimal modelled BTCs mimicking the ADE.
4.4 Implications of identifiable model parameters for hydrologic interpretation of modelling results
Our results demonstrated that poor identifiability or non-identifiability of model parameters can result in a wrong hydrological interpretation of the processes controlling solute transport in streams. Additionally, our results showed that with increasing discharge conditions Ls and qs increased, Tsto decreased, and Fmed was rather stable for simulations where the model parameters were identifiable (cf. Sect. 3.2). The low uncertainty and the values of the investigated transport metrics suggested that the transient storage at the experimental site was most probably controlled by in-stream dead zones (Boano et al., 2014; Smettem et al., 2017). Our modelling outcomes are also in line with the physical understanding of the studied stream reach. The study site is equipped with a dense network of groundwater monitoring wells that showed that the stream channel is almost entirely in gaining conditions for the investigated tracer injections, with the groundwater gradients pointing toward the stream channel (Bonanno et al., 2021). This is in line with the obtained TSM transport metrics that indicate a very limited or even lack of hyporheic exchange. Other modelling and experimental studies also outlined that the stream above the study section is dominated by the inflow of groundwater or surface water from wetlands (Antonelli et al., 2020; Glaser et al., 2016, 2020). The observed link of Ls, qs, and Tsto values with discharge (Fig. 7) also suggested that the transient storage at our site became less important in controlling solute transport with increasing discharge. The decrease in ATS and Tsto with the increasing discharge has been argued to indicate an increase in groundwater gradients toward the stream channel with a consequent decrease in the hyporheic zone at different study sites (Morrice et al., 1997; Fabian et al., 2011). However, the observed groundwater gradients at the study site exclude the presence of significant hyporheic exchange during the three simulated tracer experiments. The observed trend between modelling results with discharge might be interpreted by the fact that, as the discharge increases, the wetted profile at the study site incorporates into the advective part of the channel the dead zones and the low-flow areas that are responsible for in-stream transient storage at lower flow rates (Zarnetske et al., 2007; Gooseff et al., 2008). This would cause a progressive increase in piston-flow transport and a reduced role of in-stream solute retention with increasing flow and water level in the stream channel.
However, if we had based the process interpretation on simulations before we reached the identifiability of model parameters, the conclusions would have been different. The values for the transport metrics obtained when v and the other model parameters were considered as calibration parameters together with published results on solute residence time in the hyporheic zone and the stream channel (Gooseff et al., 2005; Boano et al., 2014) could have been interpreted in a way that the transient storage was controlled by in-stream dead zones during high-discharge events and by a low-rate hyporheic exchange under low-flow conditions (Fig. 7, blue boxplots and first TSM iteration). Conversely, results from the first TSM simulation when v was considered fixed and equal to vpeak might have been interpreted in a way that transient storage of the studied stream channel was controlled by dead zones under the lowest flow conditions and by in-stream turbulences that caused solute retention in the transient storage zone to last ∼3 s during high-flow events (Fig. 7, orange boxplots and first TSM iteration).
Our results also open developments for research seeking to increase the physical realism of the TSM and its results. Increased model complexity is associated with both a better analytical fitting to the observed BTC and an increased degree of freedom of the model with a consequent reduction of parameter identifiability (Knapp and Kelleher, 2020). Our approach offers a promising flexible tool to target parameter identifiability and physical interpretation also in TSM formulation with increasing complexity, such as multiple storage zone models (Choi et al., 2000), or for TSMs considering sorption kinetics (Gooseff et al., 2005) or different residence time distribution laws such as log-normal distribution (Wörman et al., 2002), exponential plus pumping distribution (Bottacin-Busolin et al., 2011), and power law distribution (Haggerty et al., 2002).
There is a clear need in stream hydrology to better identify parameters for simulating solute transport in streams. Here we addressed the challenge of parameter identifiability in TSMs by combining global identifiability analysis with dynamic identifiability analysis in an iterative modelling approach. Our results showed that the value of stream velocity interacts with the transient storage parameters. That is, when stream velocity was a randomly sampled calibration parameter (within a physically reasonable range), we found non-identifiable ATS and identifiable α. In contrast, when stream velocity was assumed to be equal to vpeak, ATS was found to be identifiable and α non-identifiable. We proved that such a non-identifiability of transient storage parameters can result in the modelled BTC approaching the ADE. Our work demonstrates that both transient storage and advection–dispersion parameters control the shape of the BTC when these model parameters are identifiable. This is in contrast to previous studies that reported that advection–dispersion parameters control the rising limb and the peak of the BTC and that the transient storage parameters control the tail of the BTC. We also showed that non-identifiable model parameters could severely misestimate the solute retention time in the transient storage zone (Tsto) and the exchange flux between the stream channel with the transient storage zone (qs). The differences in Tsto and qs between identifiable and non-identifiable parameters were up to 4 and 2 orders of magnitude respectively.
The modelling approach in this study constrained the parameter range iteratively. This strategy successfully reduced model dimensionality and allowed us to obtain identifiable model parameters for the three tracer experiments. As a complement to the existing body of literature, our work shows that the non-identifiability of model parameters in past studies might be related to the rather small number of sampled parameter sets compared to the investigated parameter range. The low uncertainty of the model parameters and the derived transport metrics were pivotal for obtaining a robust assessment of the hydrological processes driving the solute transport at the study site. In contrast, using non-identifiable model parameters or relying on OTIS-P results alone would have led to uncertain and rather different process interpretations at the study site.
Our study provides an enhanced understanding of the relevance of identifiable parameters of TSM models. We also provide insights into how parameter calibration without an assessment of their identifiability likely results in an unrealistic conceptualization of processes and unrealistic values for different solute transport metrics.
The interpretation of the parameter range is based on the sensitivity and identifiability of the ith parameter on the chosen model (the TSM) via a selected objective function used to compare model results with the observation (the BTC) (Kelleher et al., 2019; Wagener et al., 2003; Wagener and Kollat, 2007; Ward et al., 2017; Wlostowski et al., 2013). A parameter is called sensitive whenever a variation in the parameter value causes variations in the TSM performances (Kelleher et al., 2019). A parameter is identifiable whenever the best-fit value of that parameter is constrained on a relatively narrow range across the entire distribution of the possible parameter values (Ward et al., 2017). To assess the identifiability of the parameters of TSM, we used parameter vs. likelihood plots, identifiability plots, regional sensitivity analysis plots and parameter distribution plots.
Parameter vs. likelihood plots visualize the distribution of the investigated values of a certain parameter plotted against the corresponding values of the objective function (Wagener et al., 2003; Wagener and Kollat, 2007). Identifiable parameters are described in parameter vs. likelihood plots by a univocal increase in model performances approaching a certain optimum value of the parameter (Fig. A1a). Non-identifiable parameters are described in parameter vs. likelihood plots by a non-univocal increase in performances of the model in a certain parameter range (Fig. A1b). Parameter distribution plots show the probability density function (PDF) divided by behavioural sets (from the top 20 % to the top 0.1 % of the results for the selected objective function) (Ward et al., 2017). Identifiable parameters are indicated by a narrow range of the PDF relative to the smaller behavioural sets (top 0.1 %, 0.5 % and 1 % of the results) compared to a wider range of the PDF relative to the larger behavioural sets (top 5 %, 10 % and 20 % of the results) (Fig. A1c). Non-identifiable parameters are defined by equally wide PDFs for the different investigated behavioural sets (Fig. A1d). Regional sensitivity analysis plots are obtained after dividing the population of the parameter by behavioural sets (from the top 10 % of the results to the top 1 % of the results with a 1 % step for the selected objective function: Ward et al., 2017; Kelleher et al., 2019). Each objective function population so obtained was transformed into cumulative distribution functions (CDFs) for equal size bins of the parameter range (Kelleher et al., 2019; Wagener and Kollat, 2007). Sensitive parameters are identified by CDFs for the top 1 % of the results deviating from the CDF for the top 10 % of the results (Fig. A1e). If the CDFs lay on the 1:1 line, then the objective function is uniformly distributed across the parameter range which indicates parameter insensitivity (Fig. A1f). Identifiability plots display the CDF of the objective function across the selected parameter range (Wagener et al., 2002a; Ward et al., 2017). The slope of the CDF will be higher in the parameter interval where the model is more sensitive to that parameter. The measure of the local gradient of the cumulative distribution will be represented by the height of the bar plot in each equally sized bin across the parameter range. Higher bars and steeper gradients of the CDF line indicate greater model performances in that parameter range and, therefore, parameter sensitivity and identifiability (Fig. A1g). In contrast, an equal eight of the bars and similar gradients of the CDF line indicate that the parameter is insensitive and non-identifiable (Fig. A1h).

Figure A1Examples of the four types of visualizations intended for parameter identifiability and sensitivity, with the plots in the first column (a, c, e, g) reporting an example of plots for sensitive and identifiable parameters and plots in the second column (b, d, f, h) reporting an example of plots for an insensitive and non-identifiable parameter. (a, b) Parameter vs. likelihood plots. (c, d) Parameter distribution plots for the top 20 %, 10 %, 5 %, 1 %, and 0.1 % of the results. (e, f) Regional sensitivity analysis plots from the top 1 % to the top 10 % of the results. (g, h) Identifiability plots for the top 1 % of the model results.
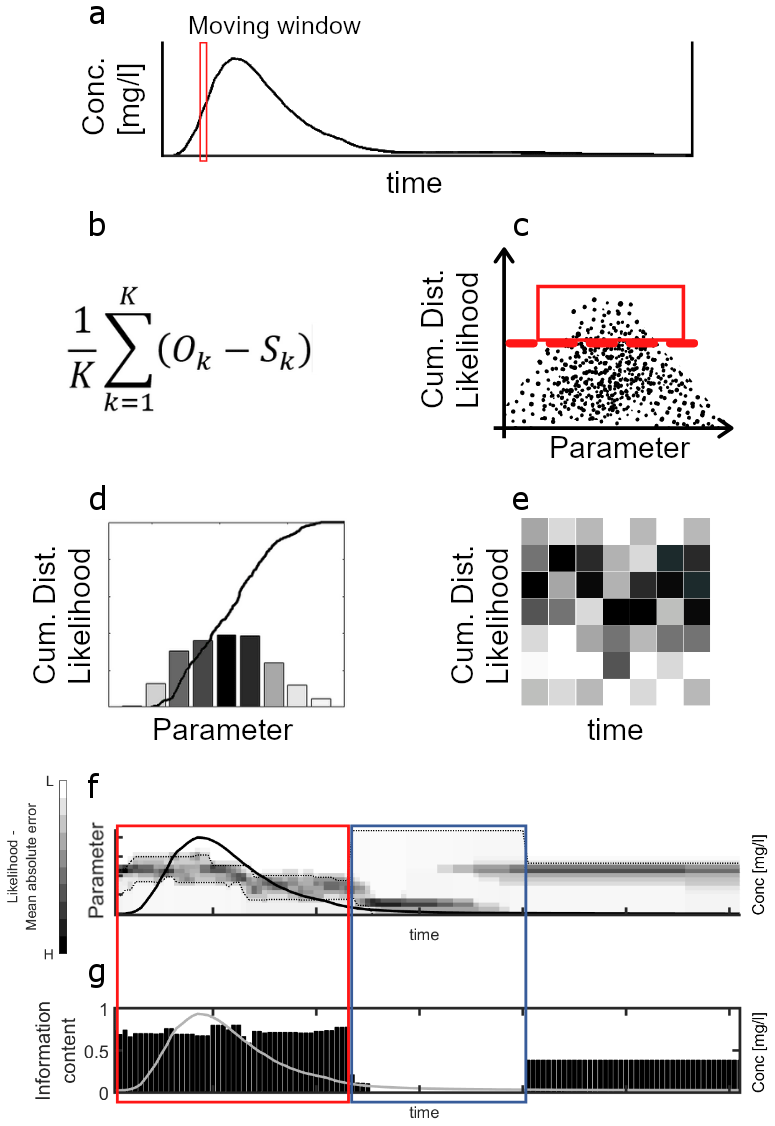
Figure A2Dynamic identifiability analysis algorithm flowchart. (a) The BTC is subdivided into moving windows (size equal to 3 times the BTC time step, Wagener et al., 2002b). (b) In each moving window the likelihood (efficiency) of every TSM simulation is evaluated via the mean absolute error (Wagener and Kollat, 2007). (c) An efficiency threshold is chosen (e.g. top 10 %). (d) For the chosen model results, the cumulative distribution function is built for each investigated parameter. (e) Steps from panels (b) to (d) are repeated for each moving window, and model likelihood for the investigated parameter is plotted over time (white: minimum likelihood; black: maximum likelihood). (f) The cumulative distribution function of the parameter distribution is plotted vs. the observed BTC together with the 90 % confidence limits. Narrow limits indicate an identifiable parameter, while wide limits indicate a non-identifiable parameter. (g) A second plot reports the metric of 1 minus the normalized distance between the 90 % confidence limits. Small values of this metric indicate that the selected time window contains a narrow identifiability range for the investigated parameter and, therefore, that it is informative on that part of the BTC (Wagener et al., 2002b).
The plots used to address the global sensitivity analysis indicate parameter identifiability and sensitivity on the entire observed BTC; however, they are unable to address whether the ith parameter describes the process it is meant to represent or whether the role of the ith parameter in the model is constant in time (Wagener and Kollat, 2007). To address the identifiability and sensitivity of the ith parameter in the different sections of the BTC, we applied a dynamic identifiability analysis whose steps are reported in Fig. A2 (Wagener et al., 2002a, b).
Figure B1 shows the observed BTC for the three tracer experiments plotted against the top 100 simulated BTCs obtained using the proposed iterative approach. The observed poor visual fit on the tail of the BTC obtained at the end of the iterative modelling approach (Fig. B1d–f) is controlled by two factors: (i) the modelling structure of the TSM which assumes an exponential residence time distribution and (ii) the chosen objective function. By using alternative residence time distributions, TSM proved to have a more accurate fitting on the tail of the BTC (Haggerty et al., 2002; Bottacin-Busolin et al., 2011). Also, the RMSE could not be the best objective function for addressing a model fit on the tail of the BTC because it gives higher importance to the sections of the BTC with higher concentration values (peak of the BTC) compared to the sections of the BTC with low concentration values (on the tail of the BTC). As an example, the best-fitting BTC obtained at the end of the second TSM iteration (E1) shows a visually better fit on the BTC tail (Fig. B2) despite the large RMSE (1.5197 mg L−1).
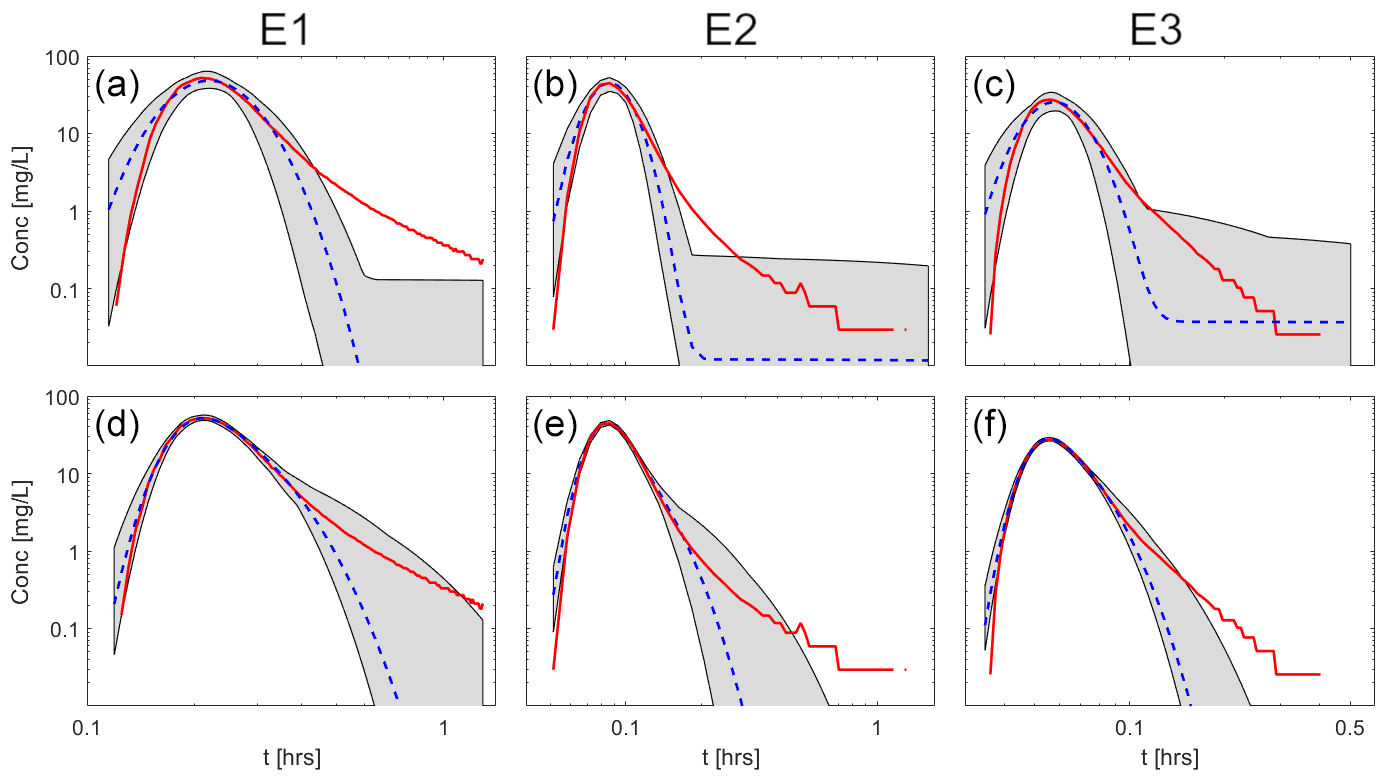
Figure B1Observed BTC (red line) together with the grey area comprised between the top 100 simulated BTCs and the best-fitting BTC (blue dashed line) for (a, d) E1, (b, e) E2, and (c, f) E3. Results are reported for the first (a–c) and last (d–f) TSM iterations.
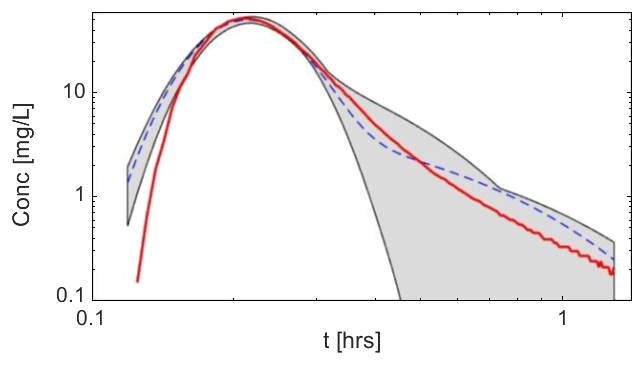
Figure B2Observed BTC (red line) together with the grey area comprised between the top 100 simulated BTCs and the best-fitting BTC (blue dashed line) for the second TSM iteration (E1).
The software code used to obtain the identifiability of the transient storage model parameter can be freely obtained at https://doi.org/10.5281/zenodo.7381262 (Bonanno, 2022).
Solute breakthrough curve and metadata can be obtained at https://doi.org/10.5281/zenodo.6457709 (Bonanno et al., 2022).
EB, GB, and JK developed the concept of the manuscript; EB took care of the methodology, conducted the experiments, programmed the software, conducted the formal analysis, prepared the original draft of the manuscript, and implemented the revisions. GB and JK supervised the project, acquired the funding, and revised and edited the manuscript. JK administrated the project.
At least one of the (co-)authors is a member of the editorial board of Hydrology and Earth System Sciences. The peer-review process was guided by an independent editor, and the author also has no other competing interests to declare.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The authors would like to thank three anonymous reviewers and editor Christa Kelleher for their supportive and constructive comments that improved the manuscript. The authors thank Ginevra Fabiani, Adnan Moussa, Laurent Pfister and Rémy Schoppach for their fruitful input and discussions during the preparation of the manuscript.
This research has been supported by the Fonds National de la Recherche Luxembourg (grant no. PRIDE15/10623093/HYDRO-CSI) and the Austrian Science Fund (grant no. DK W1219-N28).
This paper was edited by Christa Kelleher and reviewed by three anonymous referees.
Antonelli, M., Glaser, B., Teuling, A. J., Klaus, J., and Pfister, L.: Saturated areas through the lens: 1. Spatio-temporal variability of surface saturation documented through thermal infrared imagery, Hydrol. Process., 34, 1310–1332, https://doi.org/10.1002/hyp.13698, 2020.
Beltaos, S. and Day, T. J.: Field Study of Longitudinal Dispersion, Can. J. Civ. Eng., 5, 572–585, https://doi.org/10.1139/l78-062, 1978.
Bencala, K. E.: Simulation of solute transport in a mountain pool-and-riffle stream with a kinetic mass transfer model for sorption, Water Resour. Res., 19, 732–738, 1983.
Bencala, K. E. and Walters, R. A.: Simulation of solute transport in a mountain pool-and-riffle stream: A transient storage model, Water Resour. Res., 19, 718–724, https://doi.org/10.1029/WR019i003p00718, 1983.
Bencala, K. E., Gooseff, M. N., and Kimball, B. A.: Rethinking hyporheic flow and transient storage to advance understanding of stream-catchment connections, Water Resour. Res., 47, 1–9, https://doi.org/10.1029/2010WR010066, 2011.
Beven, K.: How far can we go in distributed hydrological modelling?, Hydrol. Earth Syst. Sci., 5, 1–12, https://doi.org/10.5194/hess-5-1-2001, 2001.
Beven, K. and Binley, A.: The future of distributed models: Model calibration and uncertainty prediction, Hydrol. Process., 6, 279–298, https://doi.org/10.1002/hyp.3360060305, 1992.
Beven, K., Gilman, K., and Newson, M.: Flow and flow routing in upland channel networks, Hydrolog. Sci. Bull., 24, 303–325, https://doi.org/10.1080/02626667909491869, 1979.
Bonanno, E.: BTC_analysis: GLaDY – GLobal and DYnamic identifiability analysis – BTC application (SoluteTransport), Zenodo [code], https://doi.org/10.5281/zenodo.7381262, 2022.
Bonanno, E., Blöschl, G., and Klaus, J.: Flow directions of stream-groundwater exchange in a headwater catchment during the hydrologic year, Hydrol. Process., 35, 1–18, https://doi.org/10.1002/hyp.14310, 2021.
Bonanno, E., Barnich, F., Gourdol, L., Iffly, J. F., Juilleret, J., Pfister, L., and Julian, K.: HYDRO-CSI, Project 1.2: In-stream hydrology. Part 2: instantaneous injections (Version 1.0.0), Zenodo [data set], https://doi.org/10.5281/zenodo.6457709, 2022.
Boano, F., Harvey, J. W., Marion, A., Packman, A. I., Revelli, R., Ridolfi, L., and Wörman, A.: Hyporheic flow and transport processes, Rev. Geophys., 52, 603–679, 2014.
Bottacin-Busolin, A., Marion, A., Musner, T., Tregnaghi, M., and Zaramella, M.: Evidence of distinct contaminant transport patterns in rivers using tracer tests and a multiple domain retention model, Adv. Water Resour., 34, 737–746, https://doi.org/10.1016/j.advwatres.2011.03.005, 2011.
Butterworth, J. A., Hewitt, E. J., and McCartney, M. P.: Discharge Measurement Using Portable Dilution Gauging Flowmeters, Water Environ. J., 14, 436–441, https://doi.org/10.1111/j.1747-6593.2000.tb00291.x, 2000.
Camacho, L. A. and González, R. A.: Calibration and predictive ability analysis of longitudinal solute transport models in mountain streams, Environ. Fluid Mech., 8, 597–604, https://doi.org/10.1007/s10652-008-9109-0, 2008.
Cardenas, M. B. and Wilson, J. L.: Exchange across a sediment-water interface with ambient groundwater discharge, J. Hydrol., 346, 69–80, https://doi.org/10.1016/j.jhydrol.2007.08.019, 2007.
Castro, N. M. and Hornberger, G. M.: Surface-subsurface water interactions in an alluviated mountain stream channel, Water Resour. Res., 27, 1613–1621, https://doi.org/10.1029/91WR00764, 1991.
Choi, J., Harvey, J. W., and Conklin, M. H.: Characterizing multiple timescales and storage zone interaction that affect solute fate and transport in stream, Water Resour. Res., 36, 1511–1518, 2000.
Fabian, M. W., Endreny, T. A., Bottacin-Busolin, A., and Lautz, L. K.: Seasonal variation in cascade-driven hyporheic exchange, northern Honduras, Hydrol. Process., 25, 1630–1646, https://doi.org/10.1002/hyp.7924, 2011.
Fabiani, G., Schoppach, R., Penna, D., and Klaus, J.: Transpiration patterns and water use strategies of beech and oak trees along a hillslope, Ecohydrology, 15, 1–18, https://doi.org/10.1002/eco.2382, 2022.
Glaser, B., Klaus, J., Frei, S., Frentress, J., Pfister, L., and Hopp, L.: On the value of surface saturated area dynamics mapped with thermal infrared imagery for modeling the hillslope-riparian-stream continuum, Water Resour. Res., 52, 8317–8342, https://doi.org/10.1002/2015WR018414, 2016.
Glaser, B., Antonelli, M., Hopp, L., and Klaus, J.: Intra-catchment variability of surface saturation – insights from physically based simulations in comparison with biweekly thermal infrared image observations, Hydrol. Earth Syst. Sci., 24, 1393–1413., https://doi.org/10.5194/hess-24-1393-2020, 2020.
Gooseff, M. N., LaNier, J., Haggerty, R., and Kokkeler, K.: Determining in-channel (dead zone) transient storage by comparing solute transport in a bedrock channel-alluvial channel sequence, Oregon, Water Resour. Res., 41, 1–7, https://doi.org/10.1029/2004WR003513, 2005.
Gooseff, M. N., Bencala, K. E., Wondzell, S. M., Service, U. F., Northwest, P., and Sciences, O. F.: Solute transport along stream and River Networks, in: River Confluences, Tributaries and the Fluvial Network, edited by: Rice, S. P., Roy, A. G., and Rhoads, B. L., John Wiley and Sons, https://doi.org/10.1002/9780470760383, 2008.
Gooseff, M. N., Briggs, M. A., Bencala, K. E., McGlynn, B. L., and Scott, D. T.: Do transient storage parameters directly scale in longer, combined stream reaches? Reach length dependence of transient storage interpretations, J. Hydrol., 483, 16–25, https://doi.org/10.1016/j.jhydrol.2012.12.046, 2013.
Haggerty, R., Wondzell, S. M., and Johnson, M. A.: Power-law residence time distribution in the hyporheic zone of a 2nd-order mountain stream, Geophys. Res. Lett., 29, 18-1–18-4, https://doi.org/10.1029/2002GL014743, 2002.
Hart, D. R., Mulholland, P. J., Marzolf, E. R., DeAngelis, D. L., and Hendricks, S. P.: Relationships between hydraulic parameters in a small stream under varying flow and seasonal conditions, Hydrol. Process., 13, 1497–1510, https://doi.org/10.1002/(SICI)1099-1085(199907)13:10<1497::AID-HYP825>3.0.CO;2-1, 1999.
Harvey, J. W., Wagner, B. J., and Bencala, K. E.: Evaluating the reliability of the stream tracer approach to characterize stream-subsurfacewater exchange, Water Resour. Res., 32, 2441–2451, https://doi.org/10.1029/96WR01268, 1996.
Hays J. R. Mass transport phenomena in open channel flow, Doctor of Philosophy Dissertation, Department of Chemical Engineering, Vanderbilt University, Nashville, Tennessee, 1966.
Hissler, C., Martínez-Carreras, N., Barnich, F., Gourdol, L., Iffly, J. F., Juilleret, J., Klaus, J., and Pfister, L.: The Weierbach experimental catchment in Luxembourg: A decade of critical zone monitoring in a temperate forest – from hydrological investigations to ecohydrological perspectives, Hydrol. Process., 35, 1–7, https://doi.org/10.1002/hyp.14140, 2021.
Kelleher, C., Wagener, T., McGlynn, B., Ward, A. S., Gooseff, M. N., and Payn, R. A.: Identifiability of transient storage model parameters along a mountain stream, Water Resour. Res., 49, 5290–5306, https://doi.org/10.1002/wrcr.20413, 2013.
Kelleher, C., Ward, A., Knapp, J. L. A., Blaen, P. J., Kurz, M. J., Drummond, J. D., Zarnetske, J. P., Hannah, D. K., Mendoza-Lera, C., Schmadel, N. M., Datry, T., Lewandowski, J., Milner, A. M., and Krause, S.: Exploring Tracer Information and Model Framework Trade-Offs to Improve Estimation of Stream Transient Storage Processes, Water Resour. Res., 55, 3481–3501, https://doi.org/10.1029/2018WR023585, 2019.
Knapp, J. L. A. and Kelleher, C.: A Perspective on the Future of Transient Storage Modeling: Let's Stop Chasing Our Tails, Water Resour. Res., 56, 1–7, https://doi.org/10.1029/2019WR026257, 2020.
Krause, S., Hannah, D. M., Fleckenstein, J. H., Heppell, C. M., Kaeser, D., Pickup, R., Pinay, G., Robertson, A. L., and Wood, P. J.: Inter-disciplinary perspectives on processes in the hyporheic zone, Ecohydrology, 4, 481–499, https://doi.org/10.1002/eco.176, 2011.
Krause, S., Lewandowski, J., Grimm, N. B., Hannah, D. M., Pinay, G., McDonald, K., Martí, E., Argerich, A., Pfister, L., Klaus, J., Battin, T., Larned, S. T., Schelker, J., Fleckenstein, J., Schmidt, C., Rivett, M. O., Watts, G., Sabater, F., Sorolla, A., and Turk, V.: Ecohydrological interfaces as hot spots of ecosystem processes: Ecohydrological interfaces as hot spots, Water Resour. Res., 53, 6359–6376, https://doi.org/10.1002/2016WR019516, 2017.
Lees, M. J., Camacho, L. A., and Chapra, S.: On the relationship of transient storage and aggregated dead zone models of longitudinal solute transport in streams, Water Resour. Res., 36, 213–224, https://doi.org/10.1029/1999WR900265, 2000.
Morrice, J. A., Valett, H. M., Dahm, C. N., and Campana, M. E.: Alluvial characteristics, groundwater–surface water exchange and hydrological retention in headwater streams, Hydrol. Process., 11, 253–267, https://doi.org/10.1002/(SICI)1099-1085(19970315)11:3<253::AID-HYP439>3.0.CO;2-J, 1997.
Mulholland, P. J., Marzolf, E. R., Webster, J. R., Hart, D. R., and Hendricks, S. P.: Evidence that hyporheic zones increase heterotrophic metabolism and phosphorus uptake in forest streams, Limnol. Oceanogr., 42, 443–451, https://doi.org/10.4319/lo.1997.42.3.0443, 1997.
Ouyang, S., Puhlmann, H., Wang, S., von Wilpert, K., and Sun, O. J.: Parameter uncertainty and identifiability of a conceptual semi-distributed model to simulate hydrological processes in a small headwater catchment in Northwest China, Ecol. Process., 3, 14, https://doi.org/10.1186/s13717-014-0014-9, 2014.
Pianosi, F., Sarrazin, F., and Wagener, T.: A Matlab toolbox for global sensitivity analysis, Environ. Model. Softw., 70, 80–85, https://doi.org/10.1016/j.envsoft.2015.04.009, 2015.
Rathfelder, K. M.: Modelling tools for estimating effects of groundwater pumping on surface waters, Province of BC, Water Science Series WSS2016-09, Ministry of Environment, ISBN 978-0-7726-6897-4, 2016.
Rathore, S. S., Jan, A., Coon, E. T., and Painter, S. L.: On the reliability of parameter inferences in a multiscale model for transport in stream corridors, Water Resour. Res., 57, e2020WR028908, https://doi.org/10.1029/2020WR028908, 2021.
Rodriguez, N. B., Pfister, L., Zehe, E., and Klaus, J.: A comparison of catchment travel times and storage deduced from deuterium and tritium tracers using StorAge Selection functions, Hydrol. Earth Syst. Sci., 25, 401–428, https://doi.org/10.5194/hess-25-401-2021, 2021.
Rodriguez, N. B. and Klaus, J.: Catchment Travel Times From Composite StorAge Selection Functions Representing the Superposition of Streamflow Generation Processes, Water Resour. Res., 55, 9292–9314, https://doi.org/10.1029/2019WR024973, 2019.
Runkel, R. L.: One-dimensional transport with inflow and storage (OTIS): a solute transport model for streams and rivers, US Geol. Surv. Water Resour. Invest. Rep. 98-4018, University of Michigan Library, Denver, https://doi.org/10.1002/wrcr.20277#wrcr20277-bib-0038, 1998.
Runkel, R. L.: A new metric for determining the importance of transient storage, J. N. Am. Benthol. Soc., 21, 529–543, https://doi.org/10.2307/1468428, 2002.
Schmadel, N. M., Neilson, B. T., and Stevens, D. K.: Approaches to estimate uncertainty in longitudinal channel water balances, J. Hydrol., 394, 357–369, https://doi.org/10.1016/j.jhydrol.2010.09.011, 2010.
Scott, D. T., Gooseff, M. N., Bencala, K. E., and Runkel, R. L.: Automated calibration of a stream solute transport model: Implications for interpretation of biogeochemical parameters, J. N. Am. Benthol. Soc., 22, 492–510, https://doi.org/10.2307/1468348, 2003.
Smettem, K., Klaus, J., Harris, N., and Pfister, L.: New potentiometric wireless chloride sensors provide high resolution information on chemical transport processes in streams, Water, 9, 542, https://doi.org/10.3390/w9070542, 2017.
Smith, J. W. N.: Groundwater–Surface water interactions in the hyporheic zone, Science Report SC030155/SR1, Environment Agency, Bristol, UK, ISBN 1844324257, 2005.
Taylor, G.: Diffusion by continuous movements, P. Lond. Math. Soc., 2, 196–212, 1921.
Taylor, G.: The dispersion of matter in turbulent flow through a pipe, P. Roy. Soc. Lond. A, 223, 446–468, https://doi.org/10.1098/rspa.1954.0130, 1954.
Thackston, E. L. and Schnelle, K.: Predicting effects of dead zones on stream mixing, J. Sanit. Eng. Div. Am, Soc. Civ. Eng., 93, 319–331, 1970.
Triska, F. J., Kennedy, V. C., Avanzino, R. J., Zellweger, G. W., and Bencala, K. E., Retention and Transport of Nutrients in a Third-Order Stream: Hyporheic Processes, Ecol. Soc. Am., 70, 1893–1905, 1989.
Wagener, T. and Kollat, J., Numerical and visual evaluation of hydrological and environmental models using the Monte Carlo analysis toolbox, Environ. Model. Softw., 22, 1021–1033, https://doi.org/10.1016/j.envsoft.2006.06.017, 2007.
Wagener, T., Lees, M. J., and Wheater, H. S.: A toolkit for the development and applications of parsimonious hydrological models, in: Mathematical Models of Large Watershed Hydrology, vol. 1, edited by: Singh, V. P. and Frevert, D., Water Resources Publishers, Highland Ranch, CO, 87–136, 2002a.
Wagener, T., Camacho, L. A., and Wheater, H. S.: Dynamic identifiability analysis of the transient storage model for solute transport in rivers, J. Hydroinform., 4, 199–211, 2002b.
Wagener, T., McIntyre, N., Lees, M. J., Wheater, H. S., and Gupta, H. V.: Towards reduced uncertainty in conceptual rainfall-runoff modelling: Dynamic identifiability analysis, Hydrol. Process., 17, 455–476, https://doi.org/10.1002/hyp.1135, 2003.
Wagner, B. J. and Harvey, J. W.: Experimental design for estimating parameters of rate-limited mass transfer: Analysis of stream tracer studies, Water Resour. Res., 33, 1731–1741, https://doi.org/10.1029/97WR01067, 1997.
Ward, A. S. and Packman, A. I.: Advancing our predictive understanding of river corridor exchange, WIREs Water, 6, e1327, https://doi.org/10.1002/wat2.1327, 2019.
Ward, A. S., Payn, R. A., Gooseff, M. N., McGlynn, B. L., Bencala, K. E., Kelleher, C. A., Wondzell, S. M., and Wagener, T.: Variations in surface water-ground water interactions along a headwater mountain stream: Comparisons between transient storage and water balance analyses, Water Resour. Res., 49, 3359–3374, https://doi.org/10.1002/wrcr.20148, 2013.
Ward, A. S., Kelleher, C. A., Mason, S. J. K., Wagener, T., McIntyre, N., McGlynn, B., Runkel, R. L., and Payn, R. A.: A software tool to assess uncertainty in transient-storage model parameters using Monte Carlo simulations, Freshwater Sci., 36, 195–217, https://doi.org/10.1086/690444, 2017.
Ward, A. S., Morgan, J. A., White, J. R., and Royer, T. V.: Streambed restoration to remove fine sediment alters reach-scale transient storage in a low-gradient fifth- order river, Indiana, USA, Hydrol. Process., 32, 1786–1800, https://doi.org/10.1002/hyp.11518, 2018.
Ward, A. S., Wondzell, S. M., Schmadel, N. M., Herzog, S., Zarnetske, J. P., Baranov, V., Blaen, P. J., Brekenfeld, N., Chu, R., Derelle, R., Drummond, J., Fleckenstein, J. H., Garayburu-Caruso, V., Graham, E., Hannah, D., Harman, C. J., Hixson, J., Knapp, J. L. A., Krause, S., Kurz, M. J., Lewandowski, J., Li, A., Martí, E., Miller, M., Milner, A. M., Neil, K., Orsini, L., Packman, A. I., Plont, S., Renteria, L., Roche, K., Royer, T., Segura, C., Stegen, J., Toyoda, J., Wells, J., and Wisnoski, N. I.: Spatial and temporal variation in river corridor exchange across a 5th-order mountain stream network, Hydrol. Earth Syst. Sci., 23, 5199–5225, https://doi.org/10.5194/hess-23-5199-2019, 2019.
White, D. S.: Perspectives on Defining and Delineating Hyporheic Zones, J. N. Am. Benthol. Soc., 12, 61–69, https://doi.org/10.2307/1467686, 1993.
Wlostowski, A. N., Gooseff, M. N., and Wagener, T.: Influence of constant rate versus slug injection experiment type on parameter identifiability in a 1-D transient storage model for stream solute transport, Water Resour. Res., 49, 1184–1188, https://doi.org/10.1002/wrcr.20103, 2013.
Wlostowski, A. N., Gooseff, M. N., Bowden, W. B., and Wollheim, W. M.: Stream tracer breakthrough curve decomposition into mass fractions: A simple framework to analyze and compare conservative solute transport processes, Limnol. Oceanogr.: Meth., 15, 140–153, https://doi.org/10.1002/lom3.10148, 2017.
Wörman, A., Packman, A. I., Johansson, H., and Jonsson, K.: Effect of flow-induced exchange in hyporheic zones on longitudinal transport of solutes in streams and rivers, Water Resour. Res., 38, 2-1–2-15, 2002.
Yin, J., Lu, W., Xin, X., and Zhang, L.: Application of Monte Carlo sampling and Latin Hypercube sampling methods in pumping schedule design during establishing surrogate model, in: ISWREP 2011 – Proceedings of 2011 International Symposium on Water Resource and Environmental Protection, 20-22 May 2011, Xi'an, China, 212–215, https://doi.org/10.1109/ISWREP.2011.5892983, 2011.
Zarnetske, J. P., Gooseff, M. N., Brosten, T. R., Bradford, J. H., McNamara, J. P., and Bowden, W. B.: Transient storage as a function of geomorphology, discharge, and permafrost active layer conditions in Arctic tundra streams, Water Resour. Res., 43, W07410, https://doi.org/10.1029/2005WR004816, 2007.
- Abstract
- Introduction
- Study site and methods
- Results
- Discussion
- Conclusion
- Appendix A: Parameter sensitivity and identifiability
- Appendix B: Observed vs. simulated BTCs
- Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References
- Abstract
- Introduction
- Study site and methods
- Results
- Discussion
- Conclusion
- Appendix A: Parameter sensitivity and identifiability
- Appendix B: Observed vs. simulated BTCs
- Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References