the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 03 Jun 2021
| 03 Jun 2021
Evaluation of random forests for short-term daily streamflow forecasting in rainfall- and snowmelt-driven watersheds
Leo Triet Pham
Lifeng Luo
Andrew Finley
In the past decades, data-driven machine-learning (ML) models have emerged as promising tools for short-term streamflow forecasting. Among other qualities, the popularity of ML models for such applications is due to their relative ease in implementation, less strict distributional assumption, and competitive computational and predictive performance. Despite the encouraging results, most applications of ML for streamflow forecasting have been limited to watersheds in which rainfall is the major source of runoff. In this study, we evaluate the potential of random forests (RFs), a popular ML method, to make streamflow forecasts at 1 d of lead time at 86 watersheds in the Pacific Northwest. These watersheds cover diverse climatic conditions and physiographic settings and exhibit varied contributions of rainfall and snowmelt to their streamflow. Watersheds are classified into three hydrologic regimes based on the timing of center-of-annual flow volume: rainfall-dominated, transient, and snowmelt-dominated. RF performance is benchmarked against naïve and multiple linear regression (MLR) models and evaluated using four criteria: coefficient of determination, root mean squared error, mean absolute error, and Kling–Gupta efficiency (KGE). Model evaluation scores suggest that the RF performs better in snowmelt-driven watersheds compared to rainfall-driven watersheds. The largest improvements in forecasts compared to benchmark models are found among rainfall-driven watersheds. RF performance deteriorates with increases in catchment slope and soil sandiness. We note disagreement between two popular measures of RF variable importance and recommend jointly considering these measures with the physical processes under study. These and other results presented provide new insights for effective application of RF-based streamflow forecasting.
- Article
(3588 KB) - Full-text XML
-
Supplement
(618 KB) - BibTeX
- EndNote





Nearly all aspects of water resource management, risk assessment, and early-warning systems for floods rely on accurate streamflow forecast. Yet streamflow forecasting remains a challenging task due to the dynamic nature of runoff in response to spatial and temporal variability in rainfall and catchment characteristics. Therefore, development of skillful and robust streamflow models is an active area of study in hydrology and related engineering disciplines.
While physical models remain a common and powerful tool for predicting streamflow, ML models are gaining popularity due to some of their unique qualities and potential advantages. Compared with the often labor-intensive and computationally expensive task of parameterizing in a physical model (Tolson and Shoemaker, 2007; Boyle et al., 2000), ML models are data-driven and can identify patterns in the input–output relationship without explicit knowledge of the physical processes and onerous computational demand. To make up for their limited ability to provide interpretation of the underlying mechanisms, ML models often require less calibration data than physical models, have demonstrated high accuracy in their predictive performance, are computationally efficient, and can be used in real-time forecasting (Adamowski, 2008; Mosavi et al., 2018). ML models are particularly useful when accurate prediction is the central inferential goal (Dibike and Solomatine, 2001), whereas a conceptual rainfall–runoff model can provide a better understanding of hydrologic phenomena and catchment yields and responses (Sitterson et al., 2018). Artificial neural networks (ANNs), neuro-fuzzy methods (a combination of ANNs and fuzzy logic), support vector machines (SVMs), and decision trees (DTs) are reported to be among the most popular and effective for both short-term and long-term flood forecast (Mosavi et al., 2018). For example, Dawson et al. (2006) provided flood risk estimation at ungauged sites using an ANN at catchments across the United Kingdom. Rasouli et al. (2012) predicted streamflow at lead times of 1–7 d with local observations and climate indices using three ML methods: Bayesian neural network (BNN), SVM, and Gaussian process (GP). They found that BNN outperformed multiple linear regression (MLR) and the other two ML models. Their study also found that models trained using climate indices yielded improved longer lead time forecasts (e.g., 5–7 d). Tongal and Booij (2018) forecasted daily streamflow in four rivers in the United States with SVR, ANN, and RF coupled with a baseflow separation method (i.e., separating the two different components of streamflow into baseflow and surface flow). Obringer and Nateghi (2018) compared eight parametric, semi-parametric, and non-parametric ML algorithms to forecast urban reservoir levels in Atlanta, Georgia. Their results showed that RF yielded the most accurate forecasts.
Despite the promising results reported in the existing literature, most ML streamflow forecast applications are limited to watersheds in which rainfall is the major contributor. In many settings, particularly non-arid mountainous regions in the western USA, a combination of rainfall and spring snowmelt can drive streamflow (Johnstone, 2011; Knowles et al., 2007). The amount of snow accumulation and its contribution to discharge also vary among the watersheds (Knowles et al., 2006). Both watershed-scale hydrologic and statistical models have been used to assess the current and future stream hydrology and associated flood risks (Salathé Jr et al., 2014; Wenger et al., 2010; Tohver et al., 2014; Pagano et al., 2009). Safeeq et al. (2014) simulated streamflows in 217 watersheds at annual and seasonal timescales using the variable infiltration capacity (VIC) model at and spatial resolutions. The study found that the model was able to capture the hydrologic behavior of the studied watersheds with reasonable accuracy. Yet the authors recommend that careful site-specific model calibration, using not only streamflow but also snow water equivalent (SWE) data, would be expected to improve model performance and reduce model bias. Pagano et al. (2009) applied Z-score regression to daily SWE from Snow Telemetry (SNOTEL) stations and year-to-date precipitation data to predict seasonal streamflow volume in unregulated streams in the western US. The authors reported that the skill of these forecasts is comparable to the official published outlooks. A natural question is whether ML models can produce a comparable performance in these watersheds in which streamflow contributions come from a mixture of snowmelt and rainfall and in which snowmelt dominates sources. Considering the prominent role of snowpack in water management and the contribution of rapid snowmelt to flood events, such a question is worth exploring. To this end, we evaluate the potential of RF in making short-term streamflow forecasts at 1 d of lead time across 86 watersheds in the Pacific Northwest Hydrologic Region (Fig. 1). The U.S. Geological Survey (2020) defines this region as hydrologic region 17 or HUC-17. HUC-17 consists of sub-basins and watersheds of the Columbia River that span varying hydrologic regimes. The selected watersheds have long-term records of unregulated streamflow and different streamflow contributions of rainfall and snowmelt. Drainage basin factors such as topography, vegetation, and soil can affect the response time and mechanisms of runoff (Dingman, 2015). Few studies have attempted to account for or report these effects on model performance. Without such consideration, it is difficult to determine if a data-driven model can be generalized to watersheds not included in the given study. Therefore, our objectives are (1) to examine and compare the performance of RF in a number of watersheds across hydrologic regimes and (2) to explore the role of catchment characteristics in model performance that are overlooked in previous studies.
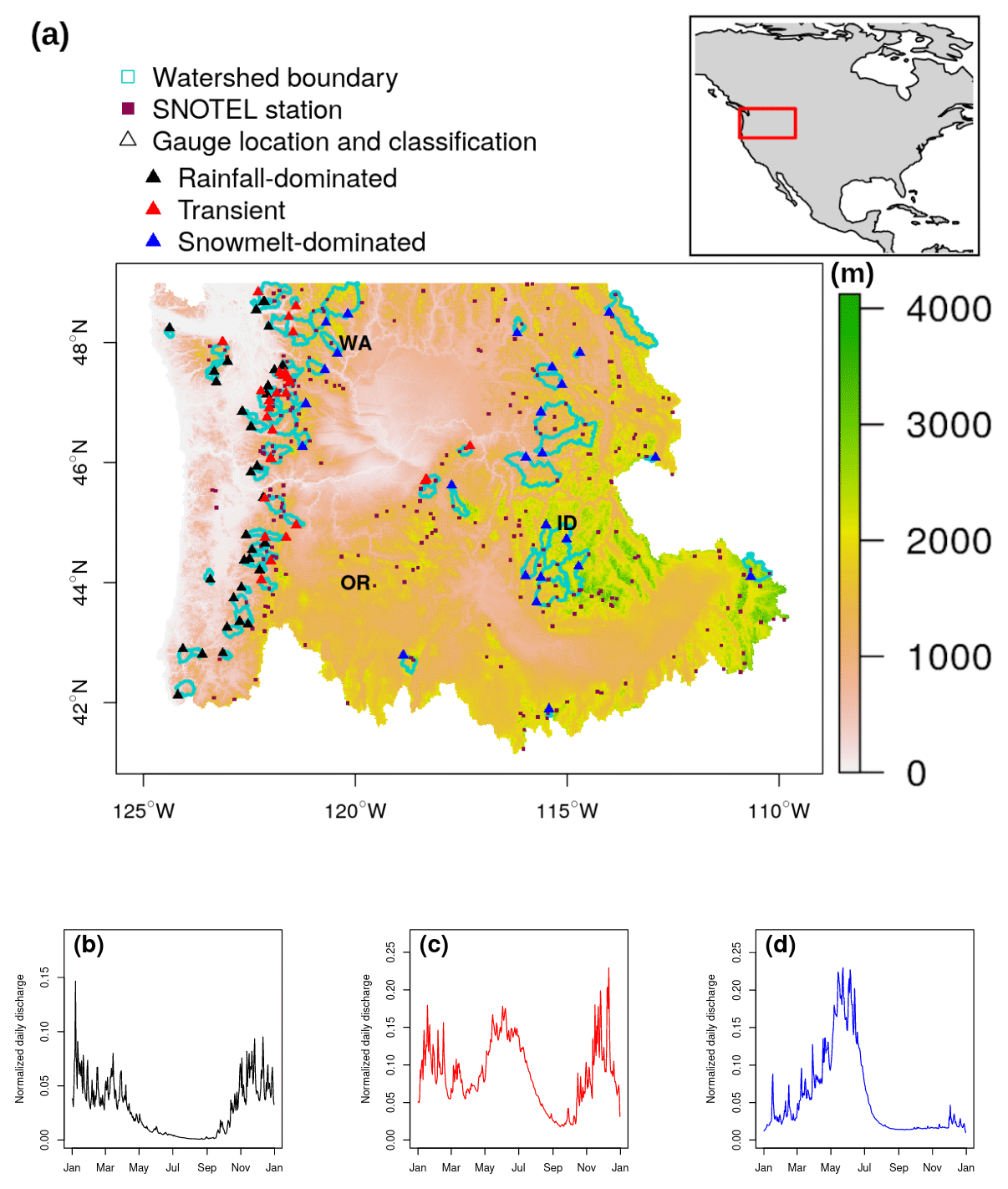
Figure 1(a) Elevation (m) shading map showing the Pacific Northwest Hydrologic Unit, 86 selected stream gauges (triangles), and their drainage area (cyan delineation lines), as well as SNOTEL stations (brown squares). Examples of annual hydrographs of (b) rainfall-dominated, (c) transient, and (d) snowmelt-dominated watersheds. Panels (b–d) are based on 2009–2018 daily flow data at three sites: 12043300 (48.2∘ N, 124.4∘ W), 12048000 (48∘ N, 123.1∘ W), and 10396000 (42.7∘ N, 118.9∘ W), respectively.
In practice, RF can be trained to forecast streamflow at various timescales depending on the input variables provided. Rasouli et al. (2012) forecasted streamflow at 1–7 d lead times using three ML models and data from combinations of climate indices and local meteo-hydrologic observations. The authors concluded that models with local observations as predictors were generally best at shorter lead times, while models with local observations plus climate indices were best at longer lead times of 5–7 d. Also, the skillfullness of all three models decreased with increasing lead times. In our study, we focused on 1 d lead time forecasting and therefore did not include long-term climate information. At longer lead times, changes in weather conditions would likely exert much greater control on runoff and the performance of the model.
We select RF to forecast streamflow for two reasons. First, RF has been referenced to deliver high performance in short-term streamflow forecasts (Mosavi et al., 2018; Papacharalampous and Tyralis, 2018; Li et al., 2019; Shortridge et al., 2016), making it a good candidate for our study. Second, RF allows for some level of interpretability. This is delivered through two measures of predictive contribution of variables: mean decrease in accuracy (MDA) and mean decrease in node impurity (MDI). These two measures have been widely used as means for variable selection in classification and regression studies in bioinformatics (Chen and Ishwaran, 2012), remote sensing classification (Pal, 2005), and flood hazard risk assessment (Wang et al., 2015). The interpretability of an ML model, however, can be a controversial subject and remains an active area of study (Ribeiro et al., 2016; Carvalho et al., 2019). Both model-agnostic interpretation methods such as permutation-based feature importance (Breiman, 2001) and model-specific interpretation methods, such as Gini-based for RF (Breiman et al., 1984) and gradient-based for ANNs (Shrikumar et al., 2017), can provide useful insights into how ML models make their predictions. While the interpretability does not directly translate to the interpretation of the physical processes, it can provide insight into relationships among predictors and streamflow response.

The remainder of the paper is arranged as follows. Section 2 provides a brief introduction to RF, relevant parameters (which can also be referred to as “hyper-parameters” in the ML literature), and selected evaluation criteria. Section 3 describes the study area, datasets, and predictor selection. Results and discussion are given in Sect. 4 along with limitations and recommendations for future research. A summary and indications for future work are provided in Sect. 5.
2.1 Random forests
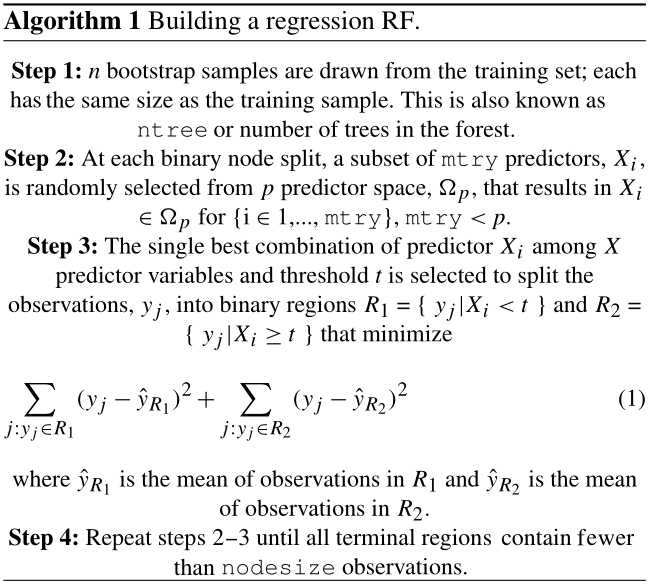
Proposed by Breiman (2001), RF is a supervised, non-parametric algorithm within the decision tree family that comprises an ensemble of decorrelated trees to yield prediction for classification and regression tasks. Non-parametric methods such as RF do not assume any particular family for the distribution of the data (Altman and Bland, 1999). Since a single decision tree can produce high variance and is prone to noise (James et al., 2013), RF addresses this limitation by generating multiple trees, with each tree built on a bootstrapped sample of the training data (Fig. 2, Algorithm 1). Each time a binary split is made in a tree (also known as a split node), a random subset of predictors (without replacement) from the full set of predictor variables is considered (Fig. 2). One predictor from these candidates is used to make the split where the expected sum variances of the response variable in the two resulting nodes is minimized (Algorithm 1, Step 3). The randomization process in generating the subset of features prevents one or more particularly strong predictor from getting repeatedly chosen at each split, resulting in highly correlated trees (Breiman, 2001). After all the trees are grown, the forests make a prediction on a new data point by having all trees run through the predictors. In the end, the forests cast a majority vote on a label class for the classification task or produce a value for the regression task by averaging all predictions. Breiman (2001) provided full details on RF and its merit. The randomForest package in R developed by Liaw and Wiener (2002) was used for model training and validation in our study. The step-by-step process of building a regression RF follows Algorithm 1.
Due to sampling with replacement, some observations may not be selected during the bootstrap. These are referred to as out-of-bag or OOB and used to estimate the error of the tree on unseen data. It has been estimated that approximately 37 % of samples constitute OOB data (Huang and Boutros, 2016). An average OOB error is calculated for each subsequently added tree to provide an estimate of the performance gain. The OOB error can be particularly sensitive to the number of random predictors used at each split mtry and number of trees ntree (Huang and Boutros, 2016). Generally, the predictive performance improves (or OOB error decreases) as ntree increases. However, recent research has shown that depending on the dataset, there is a limit for the number of trees at which additional growing does not improve performance (Oshiro et al., 2012). It has been advised that mtry is set to no larger than of the total number of predictors for optimal regression prediction (Liaw and Wiener, 2002), which is also the default value in the randomForest function in R that is widely adopted in the literature. Nevertheless, Huang and Boutros (2016) found that this value is dataset-dependent and could be tuned to improve the performance of RF. Bernard et al. (2009) argued that the number of relevant predictors highly influences the optimal mtry value. In this study, we select the optimal mtry using an exhaustive search strategy, in which all possible values of mtry are considered, using the R package Caret (Kuhn et al., 2008). While all considered parameters might have an effect on the performance of RF, we chose to focus on two parameters, ntree and mtry, for a number of reasons. The main reason is that these two parameters were originally introduced by Breiman (2001) in the development of the RF algorithm. Second, ntree in a forest is a parameter that is tunable but not optimized and should be set sufficiently high (Oshiro et al., 2012; Probst et al., 2019) for RF to achieve good performance. It has been theoretically proven that more trees are always better (Probst et al., 2019). In other words, an optimal ntree value can go to infinity. The reduction in error, however, becomes negligible after a sufficiently large number of trees. Furthermore, empirical results provided in previous works suggest that mtry is the most influential of the parameters in RF (Bernard et al., 2009; Van Rijn and Hutter, 2018; Probst et al., 2019). Figure 2 illustrates the step-by-step operating principle of growing RF and its the relevant parameters.
2.2 Variable importance in random forests
In addition to assessing a model's overall predictive ability, there is also interest in understanding the contribution of each predictor variable to model performance. There are two built-in measures for assessing variable importance in RF: mean decrease in accuracy (MDA) and mean decrease in node impurity (MDI). Both were developed by Breiman (Breiman et al., 1984; Breiman, 2001). After all trees are grown, OOB data during training are used to compute the first measure. At each tree, the mean squared error (MSE) between predicted and observed is calculated. Then the values of each of the p predictors are randomly permuted with other predictor variables held constant. The difference between the previous and new MSE is averaged over all trees. This is considered the predictor variable's MDA (Liaw and Wiener, 2002) and values are reported in percent difference in MSE. The procedure is repeated for each predictor variable. Given that there is a strong association between a predictor and response variable, breaking such a bond would potentially result in large error in the prediction (i.e., large MDA). The MDA value can be negative when a predictor has no predictive power and adds noise to the model. Strobl et al. (2007), however, expressed caution that permutation-based measures such as MDA could show a bias towards correlated predictor variables by overestimating their importance, particularly in high-dimensional datasets.
The second method, MDI, measures each time a predictor is selected to make a split during training. It is based on the principle that a binary split only occurs when residual errors (or impurity) of two descendent nodes are less than that of their parent node. The MDI of a predictor is the sum of all gains across all trees divided by the number of trees. Because the scale of MDI depends on values of the response variable, raw MDI provides little interpretation. Following Wang et al. (2015), we computed relative MDI for each variable, which in our case is calculated by dividing each predictor variable's MDI by the sum of MDI from all predictors at each watershed. When scaled by 100, this relative MDI is a percentage and can be interpreted as the relative contribution of each predictor to the total reduction in node impurities. In the case in which a predictor makes no contribution during the splitting, the relative MDI would be effectively zero. For both measures, the larger the value, the more important the predictor.
2.3 Benchmark models
We benchmark the performance of RF during the validation period against multiple linear regression (MLR) and simple naïve models using the calculated Pearson correlation coefficient (r) between forecasted and observed values for each model. In the naïve model, we assume a “minimal-information” scenario, and the best estimate of the streamflow from the next day is the observed value from the current day (Gupta et al., 1999). Its r, in this case, is the 1 d autocorrelation coefficient in the time series and measures the strength of persistence. We train and verify the MLR model using the same datasets and predictors supplied to the RF model.
2.4 Performance evaluation criteria
There are different model performance criteria and each provides unique insights on the correspondence between forecasted and observed streamflow values. While r and its square, namely the coefficient of determination (R2), are often used, Legates and McCabe (1999) discussed the limitation of these two measures when they were reported to be especially oversensitive to extreme values or outliers. The authors suggest that absolute error measures (i.e., root mean squared error or mean absolute error) and goodness-of-fit measures, such as the Nash–Sutcliffe efficiency (NSE), could provide more a reliable and conservative assessment of the models. Kling–Gupta efficiency (KGE) is a relatively new metric that was developed based on a decomposition of NSE (Gupta et al., 2009). This goodness-of-fit measure is gaining popularity as a benchmark metric for hydrologic models by addressing several shortcomings diagnosed with NSE. For these reasons, we selected the following four criteria to evaluate RF performance: R2, RMSE, MAE, and KGE. These criteria cover various aspects of model’s performance and also provide intuitive interpretation as explained in the remainder of this section.
R2 can be interpreted as the proportion of the variance in the observed values that can be explained by the model. Values are in the range between 0 and 1; a value of 1 indicates the model is able to explain all variation in the observed dataset:
where N is the total number of observations during the validation period, and and yi are the forecasted and observed values at day i, respectively, with
MAE provides an average magnitude of the errors in the model's predictions without considering the direction (underestimation or overestimation).
RMSE is the standard deviation of the residuals between the predictions and observations. It is more sensitive to larger error due to the squared operation. Both MAE and RMSE scores range between 0 and ∞; a score of 0 indicates a perfect match between predicted and observed data. The standardization in streamflow measurements (described in Sect. 3) allows comparison of MAE and RMSE across gauges.
The KGE metric ranges between −∞ and 1. While there currently is not a definitive KGE scale, Knoben et al. (2019) showed that KGE values in the range between −0.41 and 1 indicate the model improves upon the mean flow benchmark, which assumes that the predicted streamflow values equal to the mean of all observations. A KGE value of 1 suggests the model can perfectly reproduce observations. KGE is calculated as follows:
where r is the Pearson correlation coefficient, α is a measure of relative variability in the forecasted and observed values, and β represents the bias:
where is the standard deviation in observations, σy is the standard deviation in forecasted values, is the forecasted mean, and μy is the observation mean.
In a hydrological forecast, one might be interested in the ability of the model to capture more extreme events rather than the overall performance. This is particularly relevant in flood risk assessment and flood forecasting wherein floods are associated with discharge exceeding a high percentile (typically ≥ 90th) (Cayan et al., 1999). The definition of “extreme” depends on the objective of the study. Here, we adopt the peak-over-threshold method. For the validation period, we calculated the 90th, 95th, and 99th percentile streamflow values at each watershed. These are considered thresholds. If an observed daily streamflow exceeded this threshold, it would be considered an extreme event. We measure the ability of RF to capture these events using two additional criteria: probability of detection (POD) and false alarm rate (FAR). The calculation follows Karran et al. (2013):
and
where ω is a specified threshold.
3.1 Watersheds in the Pacific Northwest Hydrologic Region
In this study, we focus on watersheds in the Pacific Northwest hydrologic region (Fig. 1). This region covers an area of 836 517 km2 and encompasses all of Washington, six other states, and British Columbia, Canada. For the purpose of maintaining consistency in monitoring protocol and data, we only consider watersheds in US territory. The Columbia River and its tributaries make up the majority of the drainage area, traveling more than 2000 km with an extensive network of more than 100 hydroelectric dams and reservoirs built along these river channels. Hydropower in the Columbia River Basin supplies approximately 70 % of Pacific Northwest energy (Payne et al., 2004). Flood control is also an important aspect of reservoir operation in this region.
The north–south-running Cascade Mountain Range divides the region into eastern and western parts and strongly influences the regional climate. The windward (west) side of the mountain receives an ample amount of winter precipitation compared to the leeward (east) side. When temperature falls near the freezing point, precipitation comes in the form of snow and provides water storage for dry summer months. Summers tend to be cool and comparatively dry. East of the Cascades, summer rainfall results from rapidly developing thunderstorm and convective events that can produce flash floods (Mass, 2015). For this region, proximity to the ocean creates a more moderate climate with a narrower seasonal temperature range compared to the inland areas, particularly in the winter. Spatial trends and variations in annual mean temperature, total precipitation, drainage area, and elevation of the watersheds are shown in Fig. 3.
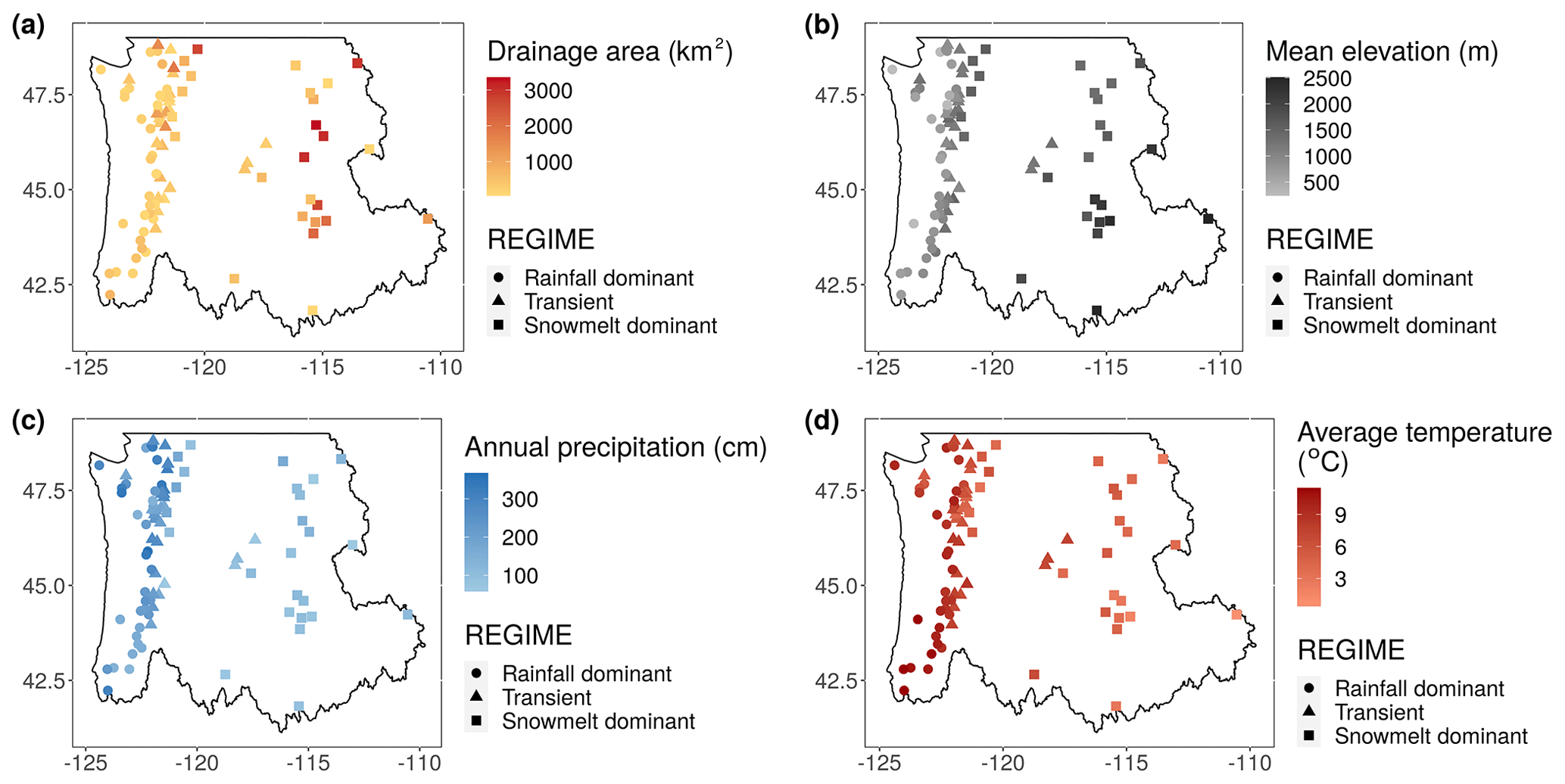
Figure 3Gauge locations with a color gradient indicating variations in (a) drainage area (km2), watershed mean elevation (m), (c) annual precipitation (cm), and (d) annual mean temperature (∘C).
3.2 Data
3.2.1 Streamflow
Our analysis uses streamflow data available through the USGS National Water Information System (NWIS) (https://waterdata.usgs.gov/nwis/sw, last access: 6 May 2021). From NWIS, we selected daily streamflow time series for gauges using the following criteria: (1) continuous operation during the 10-year period between 2009 and 2018, (2) have than 10 % missing data, and (3) positioned in watersheds with “natural” flow that is minimally interrupted by anthropogenic intervention. The third criterion was met using the GAGES-II: Geospatial Attributes of gauges for Evaluating Streamflow dataset (Falcone, 2011) classification to identify watersheds with the least-disturbed hydrologic conditions representing natural flow. We performed additional screening by computing correlation coefficient between the respective gauge and mean basin streamflow and removed those with a correlation of less than 0.5. We also excluded small creeks with a drainage area less than 50 km2. In total, 86 watersheds were selected (Fig. 1).
Table 1Number of USGS gauges used in the study for each flow regime, mean watershed elevation, drainage area, annual precipitation, and annual mean temperature ranges.

Following methodology proposed in Wenger et al. (2010), the watersheds were further grouped into three classes of hydrologic regimes based on the timing of center-of-annual flow, which is defined as the date on which half of the total annual flow volume is exceeded. The annual flow calculations follow a water-year calendar that begins 1 October and ends 30 September. These three hydrologic regimes include “early” streams with flow time < 150 (27 February), “late” streams with flow time > 200 (18 April), and “intermediate” streams with flow time between 150 and 200. These hydrologic regimes correspond to rainfall-dominated, snowmelt-dominated, and transient or transitional (mixture of rain and snowmelt) hydrographs, respectively. While this particular classification and its variants have been used in various studies related to water resources in this region (Mantua et al., 2009; Elsner et al., 2010; Vano et al., 2015), we adopted this partition in our study for two reasons. First, as Regonda et al. (2005) pointed out, the classification provides a summary of information about the type and timing of precipitation, the timing of snowmelt, and the contribution of these hydro-climatic variables to streamflow. This helps us assess model performance in consideration of sources of runoff. Second, the classification provides a basis to generalize the results to other watersheds that are not part of the study.
On average, records at these watersheds have less than 3 % missing data during the 2009–2018 period. The drainage area of the watersheds ranges between 51 and 3355 km2, and the mean elevation ranges from 239 to 2509 m, as estimated from 30 m resolution digital elevation model (Table 1).
3.2.2 Precipitation
Daily precipitation observations were obtained from the AN81d PRISM dataset (Di Luzio et al., 2008). This gridded dataset has a resolution of 4 km, covers the entire continental US from January 1981 to present, and is continuously updated every 6 months. The best-estimate gridded value is derived by using all the available data from the numbers of station networks ingested by the PRISM Climate Group. A combination of climatologically aided interpolation (CAI) and radar interpolation were used to develop the PRISM dataset. In our study, watershed daily precipitation time series were constructed by computing the arithmetic mean for precipitation values of all grid points that fall within the given watershed.
3.2.3 Snow water equivalent and temperatures
SWE is defined as the depth of water that would be obtained if a column of snow were completely melted (Pan et al., 2003). Daily SWE data were retrieved from 201 SNOTEL stations in HUC-17. These stations are part of the network of over 800 sites located in remote, high-elevation mountain watersheds in the western US. The elevation of these stations is in the range of 128 and 3142 m. At SNOTEL sites, SWE is measured by a snow pillow – a pressure-sensitive pad that weighs the snowpack and records the reading via a pressure transducer. As temperature shift is the primary trigger for snowmelt, daily maximum temperature (TMAX) and minimum temperature (TMIN) from SNOTEL sensors were also retrieved and included as predictors for streamflow. The obtained data reflected the last measurement recorded for the respective day at each site. We only supplied the last measurement from SNOTEL stations because not all predictors have sub-daily values. The dataset is mostly complete, with 99.6 %, 99.6 %, and 99.9 % of the observations available for the three variables TMAX, TMIN, and SWE, respectively. Because of the sparse coverage of SNOTEL sites, daily average values were calculated at USGS basin level (six-digit hydrological unit), similar to the currently reported snow observations from the National Water and Climate Center (https://www.wcc.nrcs.usda.gov/snow/snow_map.html, last access: 6 May 2021), and subsequently applied to the watersheds located in that basin. There is a total of 15 basins; each contains a number of SNOTEL stations in the range between 6 and 30 (Table S2 in the Supplement). It is noted the in situ data from these stations cannot capture the spatial variability of snow accumulation, and computing an area-averaged snowpack value from observations remains a challenging task (Mote et al., 2018). The SNOTEL averages therefore represent first-order estimates of snow coverage and temperature conditions.
3.2.4 Predictor selection
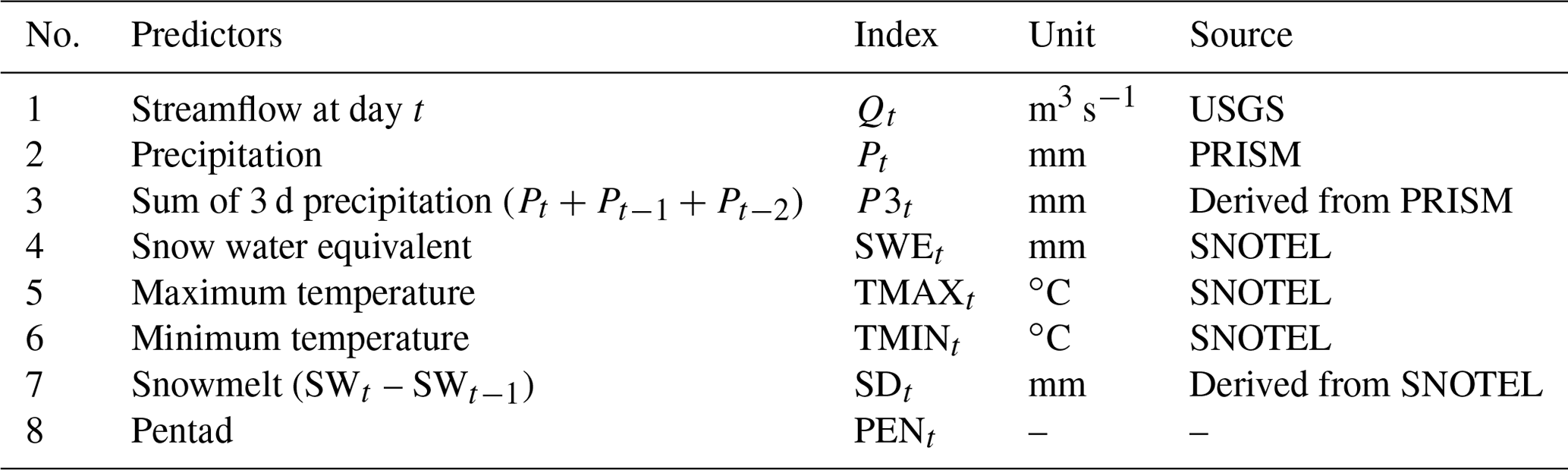
Future daily mean streamflow (Qt+1) is the response variable in our study. We attempt to explain the variability in Qt+1 using eight relevant predictors from the three datasets (Table 2). The selection of predictors is based on a thorough review of the literature from previous studies and our understanding of the hydrology of this region. Specifically, precipitation (Pt) is intuitively a driver of streamflow. SWEt provides storage information on the amount of accumulated snow available for runoff and is influenced by changes in temperature (TMAXt and TMINt). Given that there is high temporal correlation in daily temperatures, TMIN and TMAX data can provide a useful signal to our streamflow forecast. Previous-day streamflow (Qt) is particularly important due to the high degree of persistence in the time series. A hydrological year consists of 73 pentads; each comprises 5 consecutive days and the observation for each day is indexed with a pentad value between 1 and 73. Data preprocessing showed moderate to strong nonlinear temporal correlation between daily streamflow and the pentad at each gauge. We also derived two variables from available data: the sum of 3 d precipitation (P3t) and snowmelt (SDt). Inclusion of 3 d precipitation was to account for large winter storms that can last for several days, which often result in surges in streamflow. SDt was calculated as the difference between SWE at day t and t−1. A positive value of SDt indicates snow accumulation, and a negative value indicates melt.
Soil moisture is also a relevant variable in streamflow modeling as it controls the partition between infiltration and runoff of precipitation (Aubert et al., 2003). However, soil moisture data are often limited and incomplete, especially at a daily interval, and are therefore not included in this study. The data were divided into two sets: training consisting of 7 years (2009–2015) and a validation set of 3 years (2016–2018). We standardized training and validation data at each gauge using min–max scaling. First, we computed the min and max values from training datasets for each of the predictor and response variables at each watershed. These min and max values were then used to standardize both training and validation datasets. The training data, which were used to compute min–max values for standardization, therefore have values between 0 and 1. A flowchart representing the input–output model using RF is shown in Fig. 4.
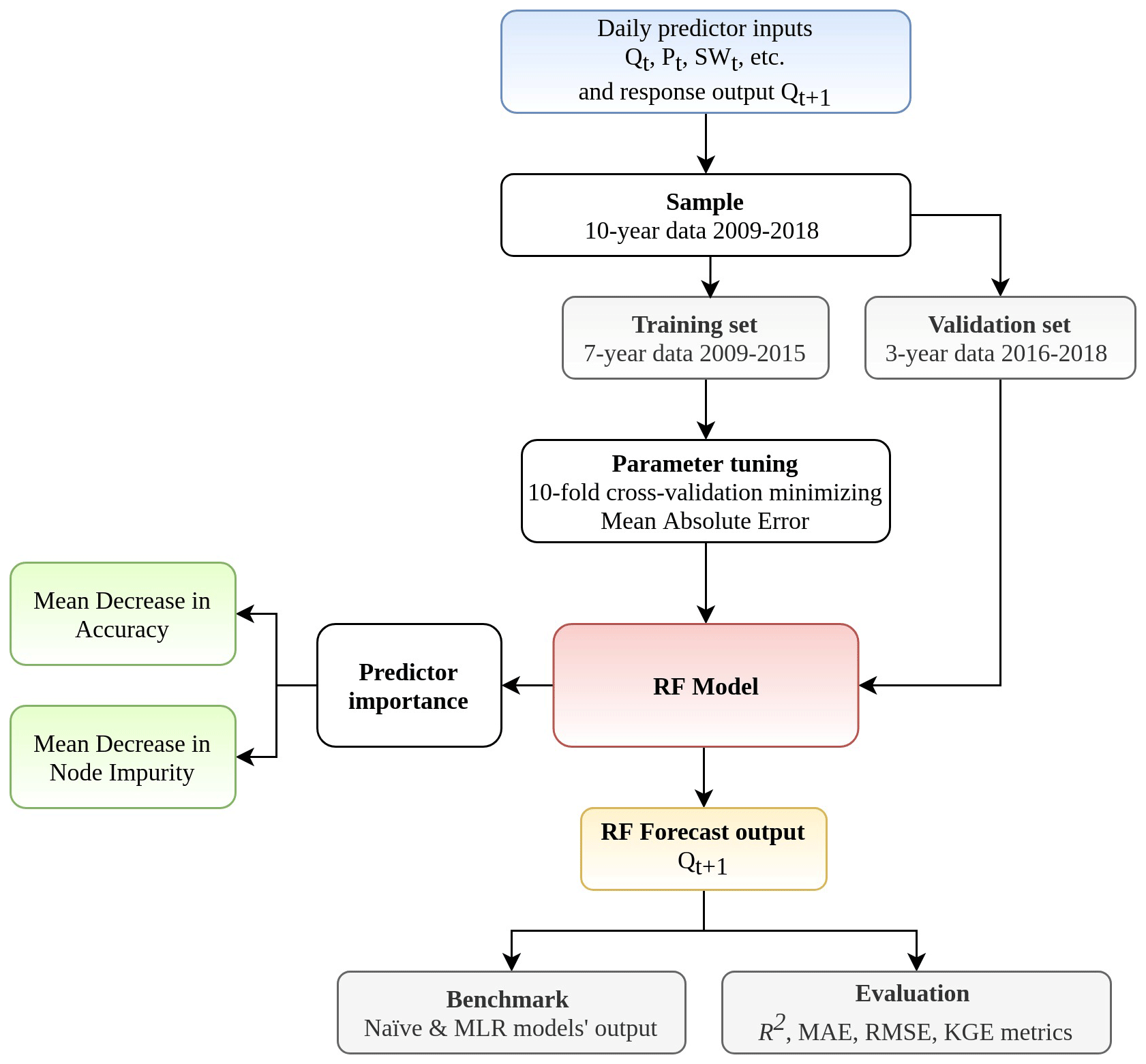
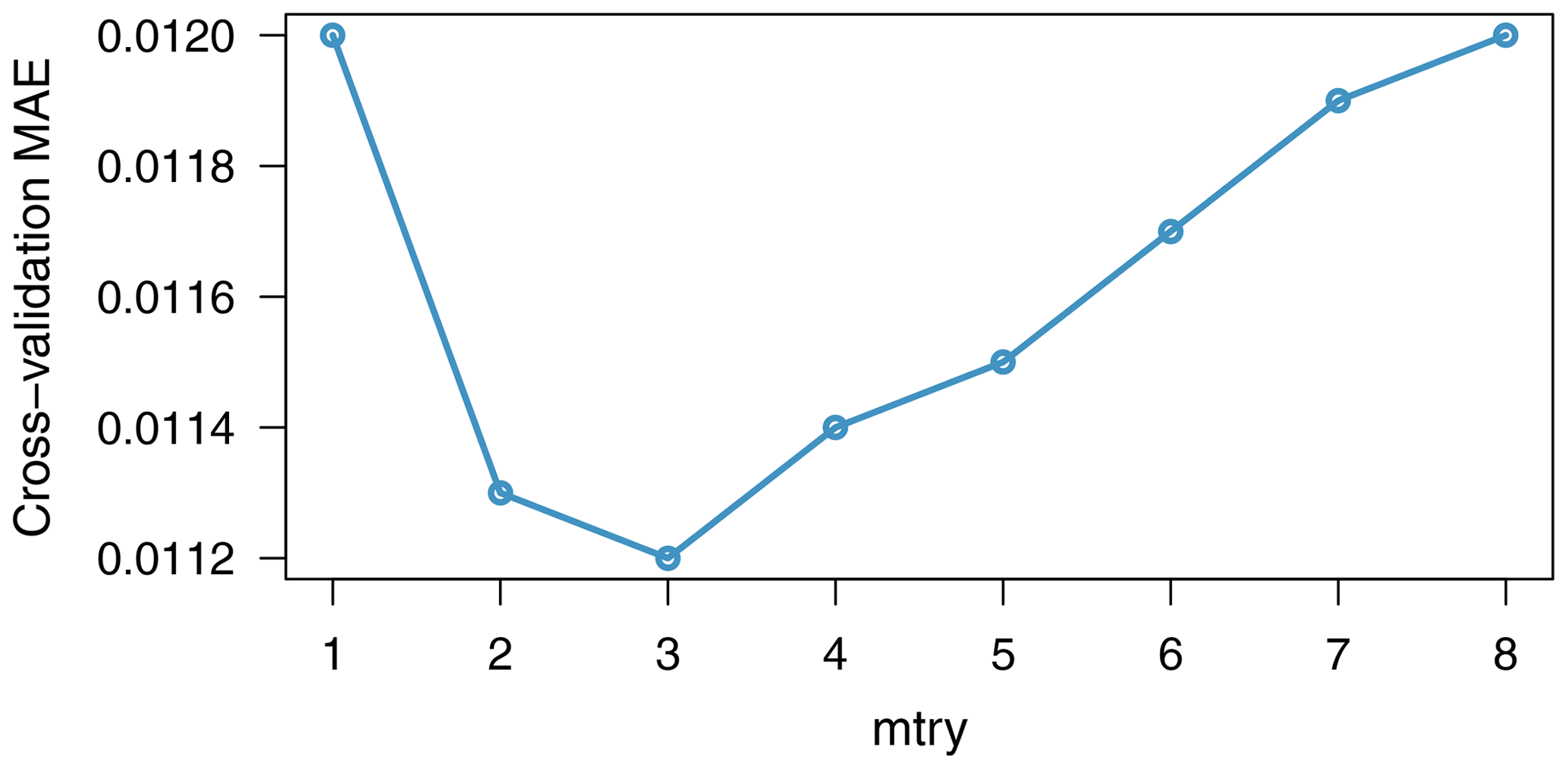
Figure 5Out-of-bag mean absolute error plotted against mtry during an optimal parameter search at the Carbon River Watershed (USGS site 12094000).
4.1 Parameter tuning
As we mentioned in Sect. 2, the error rate in RF can be sensitive to two parameters: the number of trees ntree and the number of randomly selected predictors available for splitting at each node mtry. We tested RF on training datasets of 30 randomly chosen watersheds and observed that the reduction in the out-of-bag MAE error is negligible after 2000 trees. We then set ntree = 2000 for all 86 watersheds; mtry, on the other hand, was tuned empirically using a combination of an exhaustive search approach and cross-validation.
Table 3The optimized parameter mtry using an exhaustive search strategy (mtry = {1, 2, 6, 7, 8} was considered but not found to be the optimal value at any gauge).
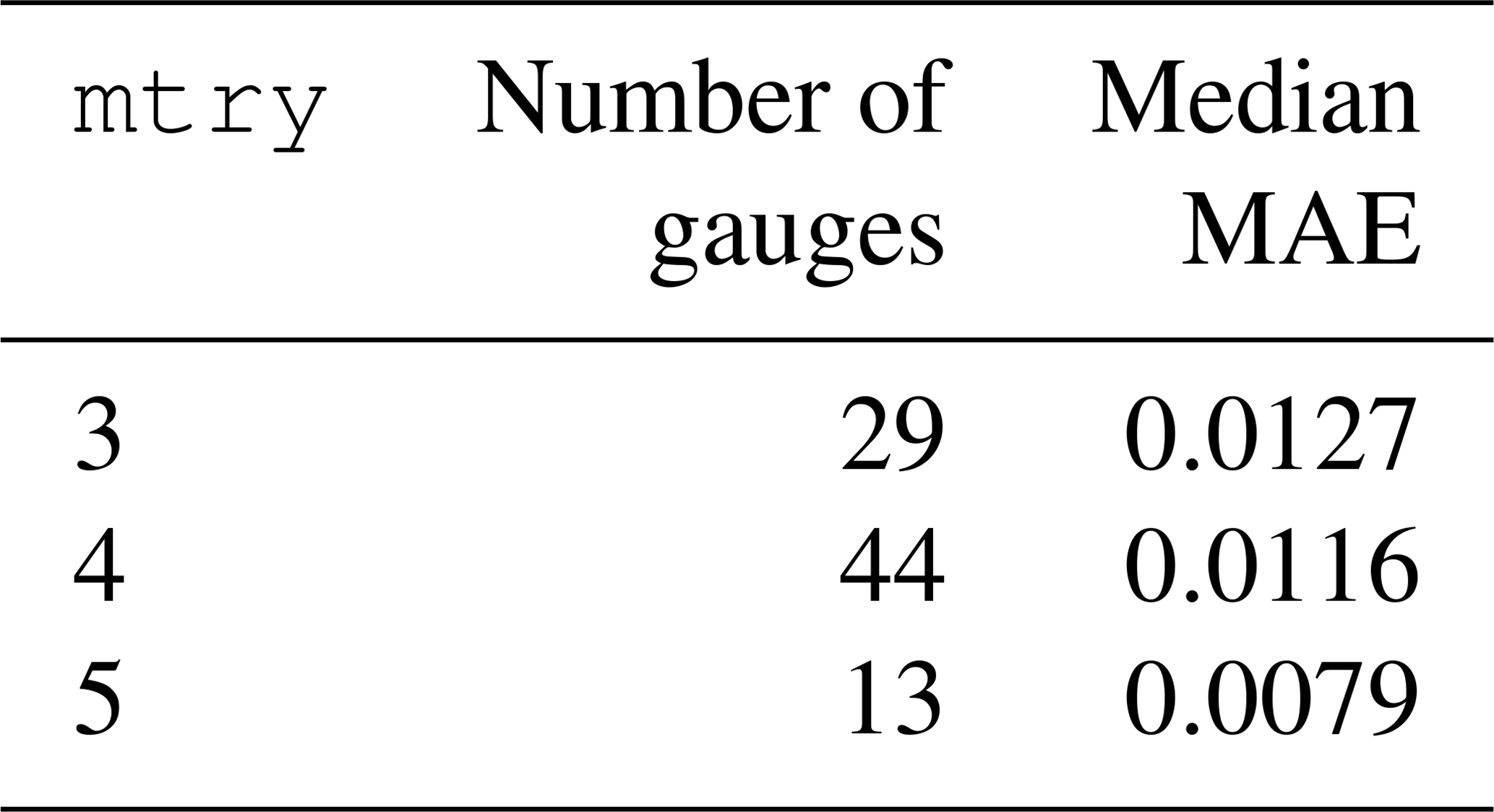
The goal of tuning is to select the mtry parameter value that would optimize the performance of the model. The candidates were evaluated based on their OOB mean absolute error (MAE). At each watershed, eight possible candidate values of mtry (1–8) were analyzed by three repetitions of 10-fold cross-validation from the training dataset. Averaging the MAE of repetitions of the cross-validation procedure can provide more reliable results as the variance of the estimation is reduced (Seibold et al., 2018). To illustrate, in Fig. 5, lowest cross-validation MAE is obtained at mtry = 3 at the Carbon River Watershed (USGS site 12094000). The results of tuning for all gauges (Table 3) show that the optimal mtry values are {3, 4, 5} with a median MAE of 0.0127, 0.0116, and 0.0079, respectively. The optimal mtry at each gauge was then used in both training and validating the model.
Because the number of predictors in our study is relatively small, the computation burden of the exhaustive search was manageable. As the number of candidate grows, a random search strategy (Probst et al., 2019), in which values are drawn randomly from a specified space, can be more computationally efficient.
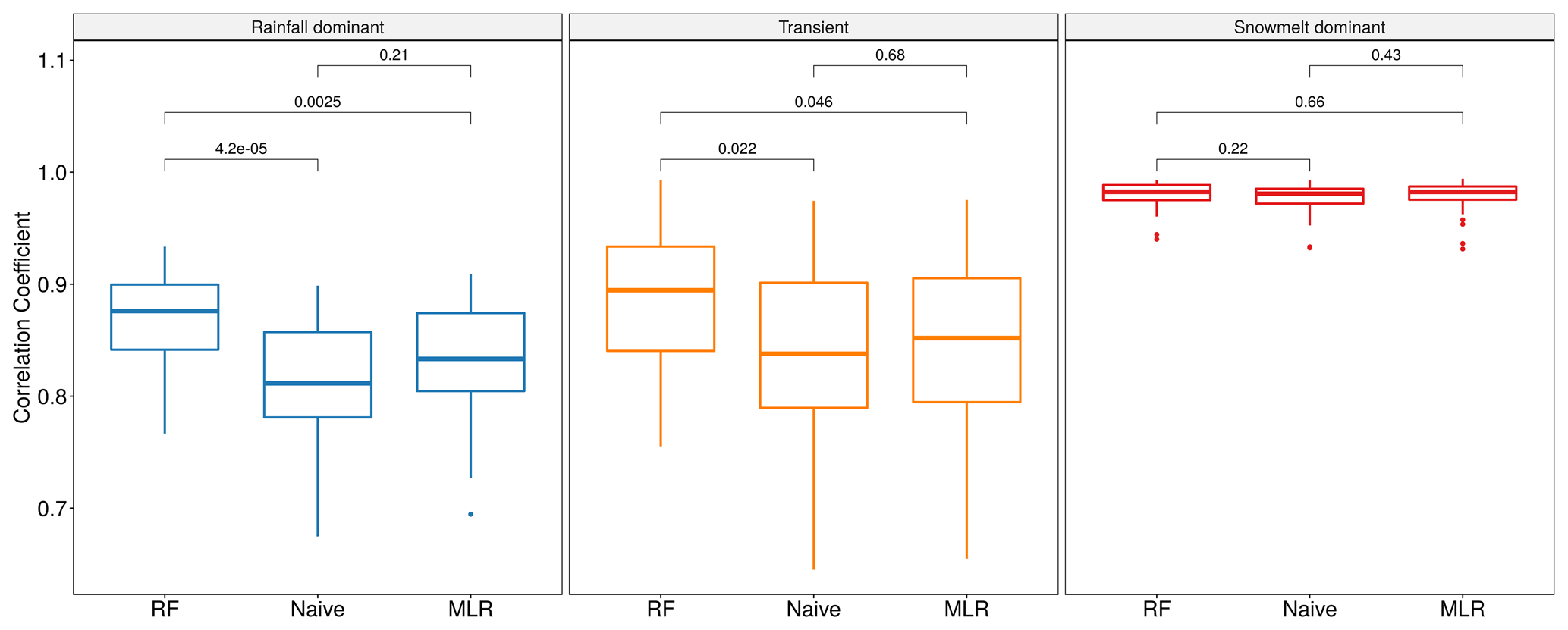
Figure 6Box plots for the Pearson correlation coefficient between forecasted and observed values for three models across three flow regimes: RF, naïve, and MLR. Two-sample Wilcoxon rank-sum significance tests are performed, and p values (in black) are included for each pair of models.
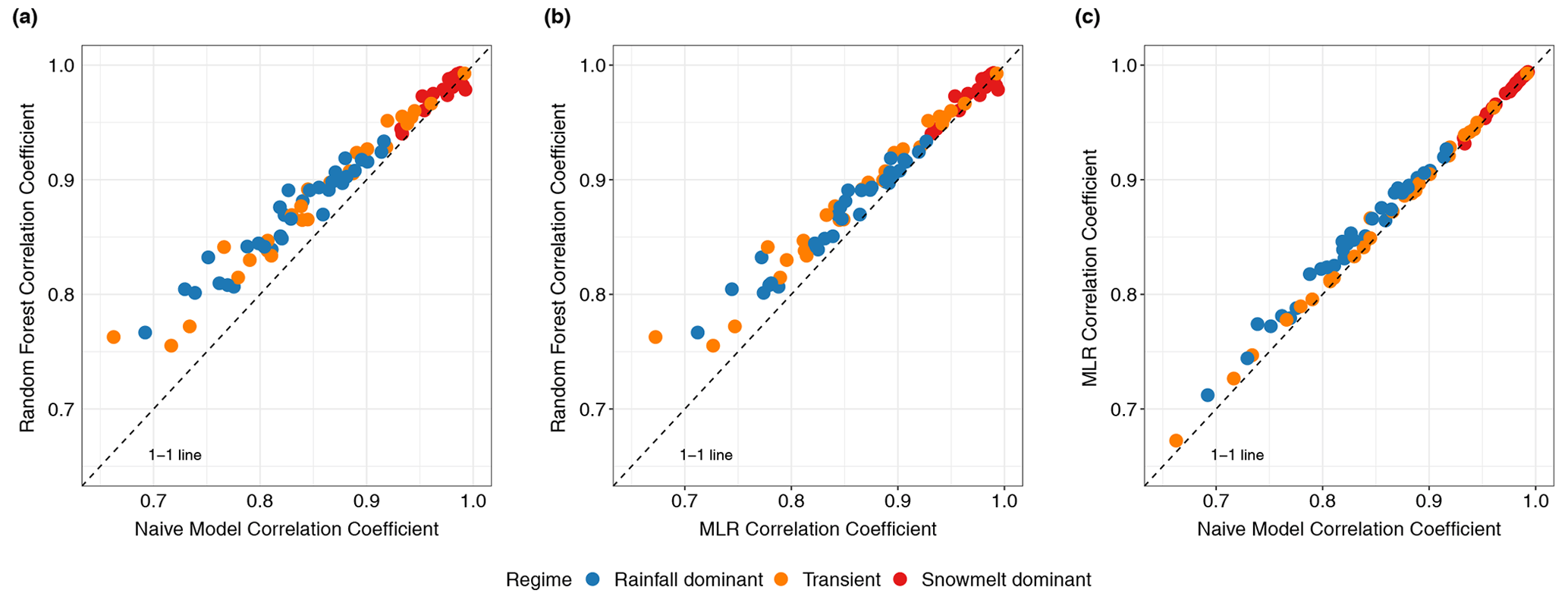
Figure 7Pairwise scatter plots of the Pearson correlation coefficient between forecasted and observed values for (a) RF vs. the naïve model, (b) RF vs. MLR, and (c) MLR vs. the naïve model. Each dot represents a watershed (n=86).
4.2 Benchmark RF against MLR and naïve models
Figure 6 shows the distributions of the Pearson correlation coefficient (r) between forecasted and observed values obtained from the three models: RF, naïve, and MLR. Non-parametric, two-sample Wilcoxon rank-sum significance tests (Wilcoxon et al., 1970), which are used to assess whether the values obtained between two separate groups are systematically different from one another, suggest that the pair-wise differences in r values between RF and the other two models are statistically significant (p<0.05) in two flow regimes. RF is observed to outperform both naïve and MLR models in rainfall-driven and transient watersheds. Among snowmelt-driven watersheds, the three models yield similar correlation coefficients (p>0.05). In Fig. 7a, we observe that most points lie on the left of the 1-to-1 line, suggesting that RF outperforms the naïve model at most individual watersheds in rainfall-driven and transient regimes. We also discern that large improvement, defined as the positive difference in r values between RF and the naïve model, tends to occur with lower persistence (lower r values from the naïve model). This suggests that application of RF would be most beneficial at watersheds in which next-day streamflow is less dependent on the condition of the current day. Among snowmelt-driven watersheds, the data points lie on the 1-to-1 line, indicating that the three models show a marginal difference in r values. As Mittermaier (2008) pointed out, the choice of reference can affect the perceived performance of the forecast system. Our pair-wise comparisons highlight the fact that evaluating data-driven models should be performed in consideration of the autocorrelation structure in the data (Hwang et al., 2012). Without accounting for persistence, it would be inadequate to conclude that RF gives better performance in snowmelt-driven watersheds. Nevertheless, we observe that RF outperformed MLR in all rainfall-dominated and transitional watersheds and 19 out of 25 snowmelt-dominated watersheds. The median r values for RF in the three groups are 0.88, 0.89, and 0.98 compared to 0.85, 0.87, and 0.98 for MLR. This may reflect RF's better ability to capture the nonlinear relationship between streamflow and other variables.
4.3 Evaluation of RF overall performance
We next evaluated the overall performance of RF across three flow regimes using four criteria: R2, KGE, MAE, and RMSE (Table 4, Fig. 8). Here, we observe a similar trend in R2, KGE, MAE, and RMSE scores compared to the r-value trend in Fig. 6, where RF performs better in snowmelt-dominated than in rainfall-dominated watersheds (higher R2 and KGE, lower MAE and RMSE). Snowmelt-dominated watersheds have the smallest range of R2 values across the three groups. This may suggest that there is less variability in flow behaviors at individual gauges in this group and is consistent with the observed data for which hydrographs of snowmelt-driven watersheds tend to be less flashy compared to rainfall-driven watersheds. Not surprisingly, the transitional group has the largest spread in R2 values as watersheds in this group share characteristics from the other two groups.

Figure 8Streamflow daily forecast scores computed over the validation period for the RF model in four metrics: R2, KGE, MAE, and RMSE.
Table 4Descriptive statistics of the four criteria used to evaluate the overall performance of RF: R2, KGE, MAE, and RMSE.

Because RMSE is more sensitive to larger errors compared to MAE, the difference between the two scores represents the extent to which outliers are present in error values (Legates and McCabe, 1999). In the rainfall-driven and transient groups, the shape of the box-plot distributions remains fairly consistent between the two error scores, suggesting that the distribution of large errors is similar to that of mean errors in these watersheds (Fig. 8). The MAE scores are heavily skewed towards 0, while RMSE scores are more evenly spread among snowmelt-driven watersheds. In snowmelt-driven watersheds, we observe a noticeably wider interquartile range (difference between the first quartile and third quartile) in the RMSE plot compared to the MAE plot. This indicates that RF can still be susceptible to underestimation or overestimation in watersheds in which the mean error is relatively low.
In Table 4, KGE scores are reported in a range of 0.64–0.99 for all watersheds. The median values for each flow regime are 0.84, 0.87, and 0.94. As observed mean flow is used in the calculation of KGE, Knoben et al. (2019) suggested that a KGE score greater than −0.41 indicates that a hydrologic model improves upon the forecast with mean flow, independent of the basin. Therefore, RF can be seen to give a satisfactory performance at all watersheds in our study. Our results are comparable to findings in Tongal and Booij (2018) in which the authors compare the performance of RF, SVM, and ANN to simulate daily discharge with baseflow separation at four rivers in California and Washington. Although the authors did not classify these basins, it can be inferred that three of the rivers were rainfall-driven and one was snowmelt-driven. RF model in their study produced KGE scores of 0.41, 0.81, and 0.92 for the rainfall-driven water basins (without baseflow separation). However, our KGE scores for snowmelt-fed watersheds (with a median of 0.94) are higher compared to the reported 0.55 in their study.
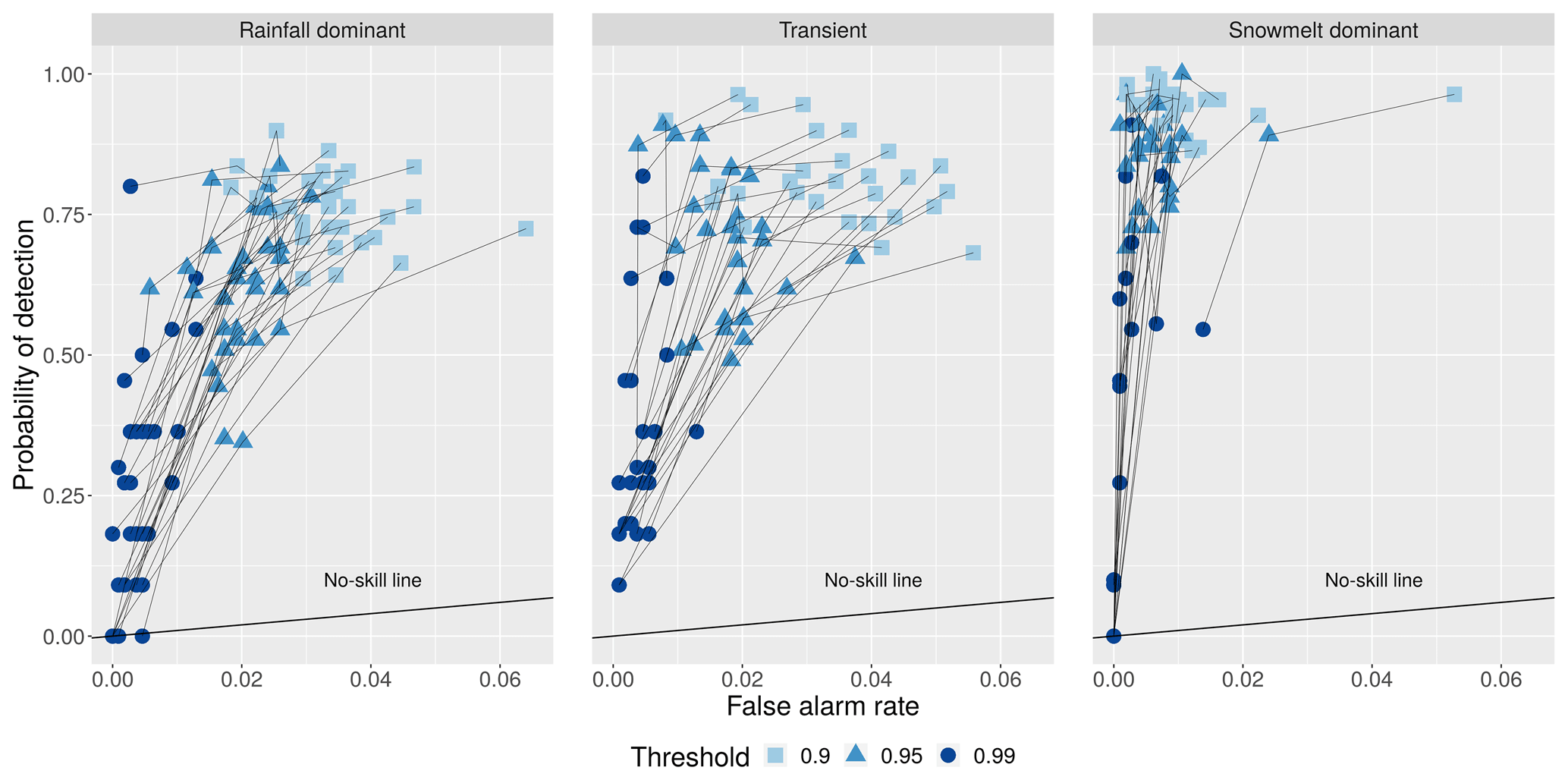
Figure 9The probability of detection (POD) plotted against the false alarm rate (FAR) for three extreme thresholds: 90th, 95th, and 99th percentiles. The thin black line connects values from the same watershed. The vertical axis indicates the number of times RF correctly forecasted events that exceeded the threshold divided by the total number of exceedance. The horizontal axis indicates the number of times RF incorrectly forecasted events that exceeded the threshold divided by the total number of non-exceedance. It is noted that the scales of the horizontal and vertical axes are not 1-to-1 in the plotted partial receiver operating characteristic (ROC) curve.
4.4 RF performance on extreme streamflows
We also examine the model's capacity to forecast extreme events because of their potential high impact and associated flood risks in this region. The ability of RF to correctly detect extreme flows exceeding 90th, 95th, and 99th percentile thresholds (defined as the POD) for each watershed is plotted against the FAR in Fig. 9. A threshold point falling below the no-skill line indicates the model yields higher FAR than POD and is considered to have no predictive power for that threshold. RF becomes expectedly less skillful in its forecasts with an increase in the magnitude of the events. The model tends to perform better among snowmelt-dominated watersheds (higher POD, lower FAR) compared to those in transient and rainfall-driven groups. At the 95th threshold, RF can correctly forecast at least 50 % of the extreme events (POD > 0.5) at most watersheds. At the 99th threshold, the difference in RF's ability to forecast extreme streamflow among the three flow regimes becomes less obvious. In snowmelt-driven watersheds, 8 out of 25 have POD > 0.5, 9 have POD between 0.01 and 0.5, and 8 have a POD of 0. While few studies have examined complex diurnal hydrologic responses in high-elevation catchments (Graham et al., 2013), our particular result suggests that large surges in streamflow sustained by spring and early summer snowmelt can be difficult to predict, even at 1 d of lead time, and is an ongoing research subject (Ralph et al., 2014; Cho and Jacobs, 2020). In our study, we observe that high POD is accompanied by low FAR for the same threshold. This may suggest that RF is skillful in its forecasts of extreme events.
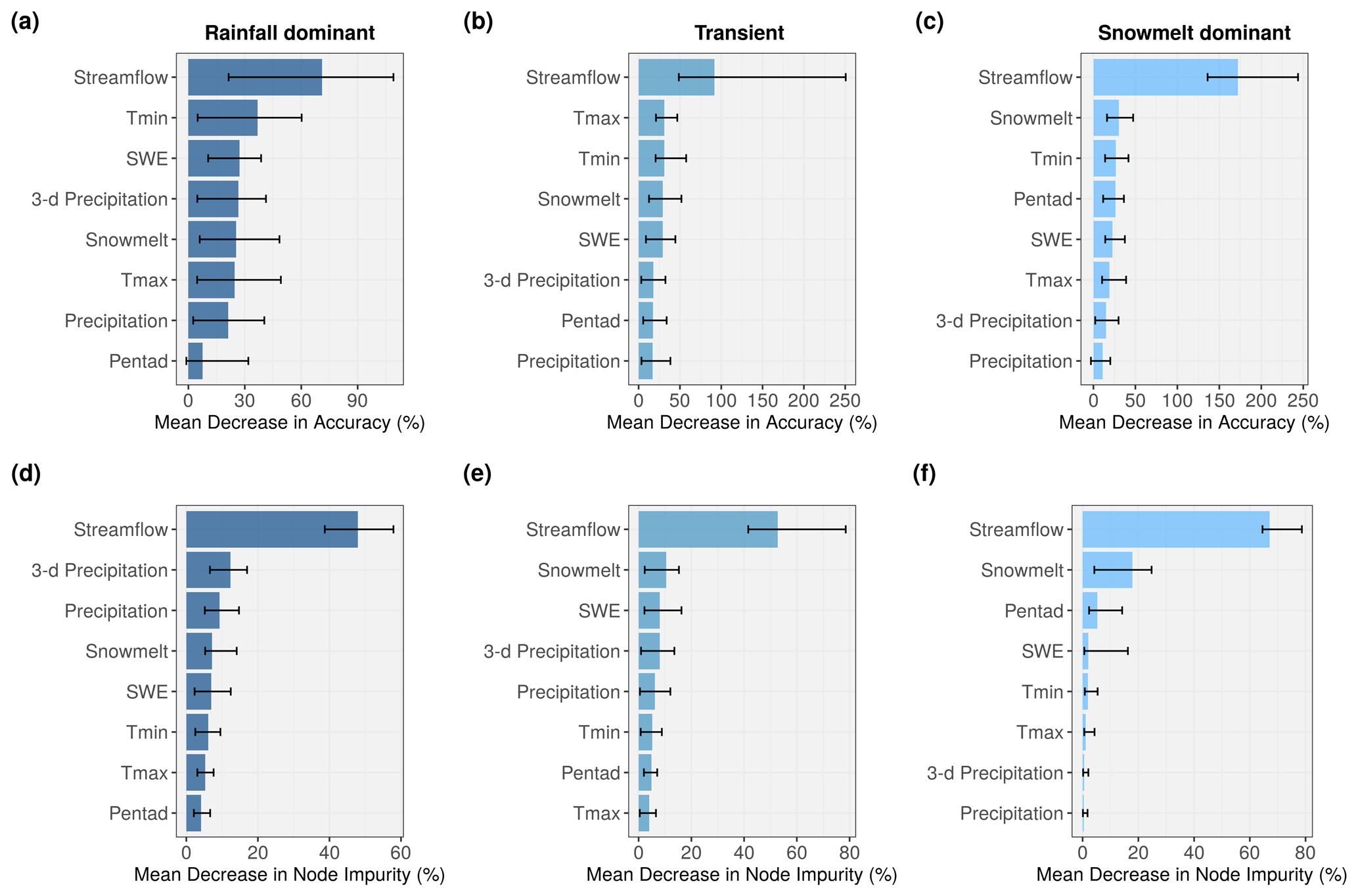
Figure 10Bar plots showing the importance of predictor variables using (a–c) MDA and (d–f) MDI criteria. The length of the blue bars indicates the median value across the watersheds for each flow regime, and the thin black bar represents the full range of the values.
4.5 Analysis of variable importance
Variable importance is a useful feature in both understanding the underlying process of a current model and generating insights for the selection of variables in future studies (Louppe et al., 2013). RF quantifies variable importance through two measures: MDA and MDI (Fig. 10). In both measures, the higher value indicates that the variable contributes more to the model accuracy. Intuitively, streamflow from the previous day is shown to be the most importance variable due to persistence. This is reflected across three flow regimes and two measures. We also observe that the sum of 3 d precipitation tends to have more predictive power than 1 d precipitation. Maximum temperature and minimum temperature share similar contribution; minimum temperature tends to receive slightly higher scores. Among snowmelt-dominated watersheds (Fig. 10c and 10f), we anticipate that snow indices (SDt and SWEt) contribute more to the prediction than precipitation, and this is also reflected. Surprisingly, pentad comes third and fourth in MDI and MDA, respectively. This supports the long-term snowpack memory of daily streamflow (Zheng et al., 2018) and can be useful in real-time prediction. Precipitation does not seem to have a significant contribution to the model's accuracy among the snowmelt-dominated watersheds. Although PRISM precipitation data include both rainfall and snowfall, it is likely that the majority of fallen precipitation in these high-altitude watersheds is stored as snow on the surface and does not immediately contribute to runoff. Li et al. (2017) estimated that 37 % of the precipitation falls as snow in the western US, yet snowmelt is responsible for 70 % of the total runoff in mountainous areas. It is still very surprising to observe such a low contribution of the precipitation variable to RF model accuracy. Nevertheless, we observe general agreement between the two measures in ranking of the variables in the snowmelt-driven group.
In transient and rainfall-dominated groups, there is noticeable disagreement between the two criteria. Precipitation (Pt) and 3 d precipitation (P3t) tend to rank lower in the MDA measure (Fig. 10a and 10b) compared to MDI (Fig. 10d and 10e). Specifically, in the rainfall-dominated group, 3 d precipitation and precipitation are placed second and third based on median MDI compared to fourth and seventh in MDA. Maximum and minimum temperatures, on the other hand, tend to be more important in MDA calculation compared to MDI. In Shortridge et al. (2016), an RF model was used to predict streamflow at five rain-fed rivers in Ethiopia. Similarly calculated MDA in that study suggested that precipitation was less important (7.71 %) than temperature (12.74 %). A linear model in the same study, however, considered the coefficient for precipitation to be significant (p≪0.01), while the temperature coefficient was not (p=0.08). In Obringer and Nateghi (2018), the authors predicted daily reservoir levels in three reservoirs in Indiana, Texas, and Atlanta using RF and other ML techniques. Precipitation was reported as the least important variable and ranked behind dew point temperature and humidity. Inspecting the probability density functions of our predictors, we suspect that for variables that are heavily skewed and zero-inflated (e.g., precipitation), permutation-based MDA may underestimate their importance compared to those that are more normally distributed such as maximum and minimum temperatures. In our precipitation data (both training and validation), at least 30 % of the daily observations are zeros across the watersheds. There is a high likelihood that the day with zero precipitation ends up with the same value during the shuffling process, thus potentially affecting the randomness created to compute MDA. While we did not perform additional simulations to further confirm whether MDA and MDI measures are sensitive to highly skewed and zero-inflated variables, this can be a topic of future research. Strobl et al. (2007), however, showed that RF variable importance measures can be unreliable in situations in which predictor variables vary in their scale of measurement. It is noted that the scale of measurement not only refers to the numeric range but also the nature of the data (e.g., ordinal vs. continuous). Among our eight predictors in our study, pentad is considered an ordinal variable. Also, the scales of measurement of precipitation and temperature variables are slightly different. Precipitation is a flux variable and comprises discrete and continuous components in that if it does not rain the amount of rainfall is discrete, whereas if it rains the amount is continuous. Temperature is a state variable and always continuous. Temperature predictors receiving higher MDA can also be due to identified bias whereby permutation-based importance measures overestimates the true contribution of correlated variables (Gregorutti et al., 2017). In our study, temperature variables tend to have more correlation with other predictors than the two precipitation variables. This is likely because temperature controls both the form of precipitation (snowfall vs. rainfall) and the timing of snowmelt. There is also an ongoing discussion regarding the stability of both measures, in which the two variable importance measures can yield noticeably different rankings, in simulated datasets (Calle and Urrea, 2010; Nicodemus, 2011; Ishwaran and Lu, 2019). Although results from MDI make more sense in our case, we suggest that RF users exercise caution when interpreting outputs from these two measures.
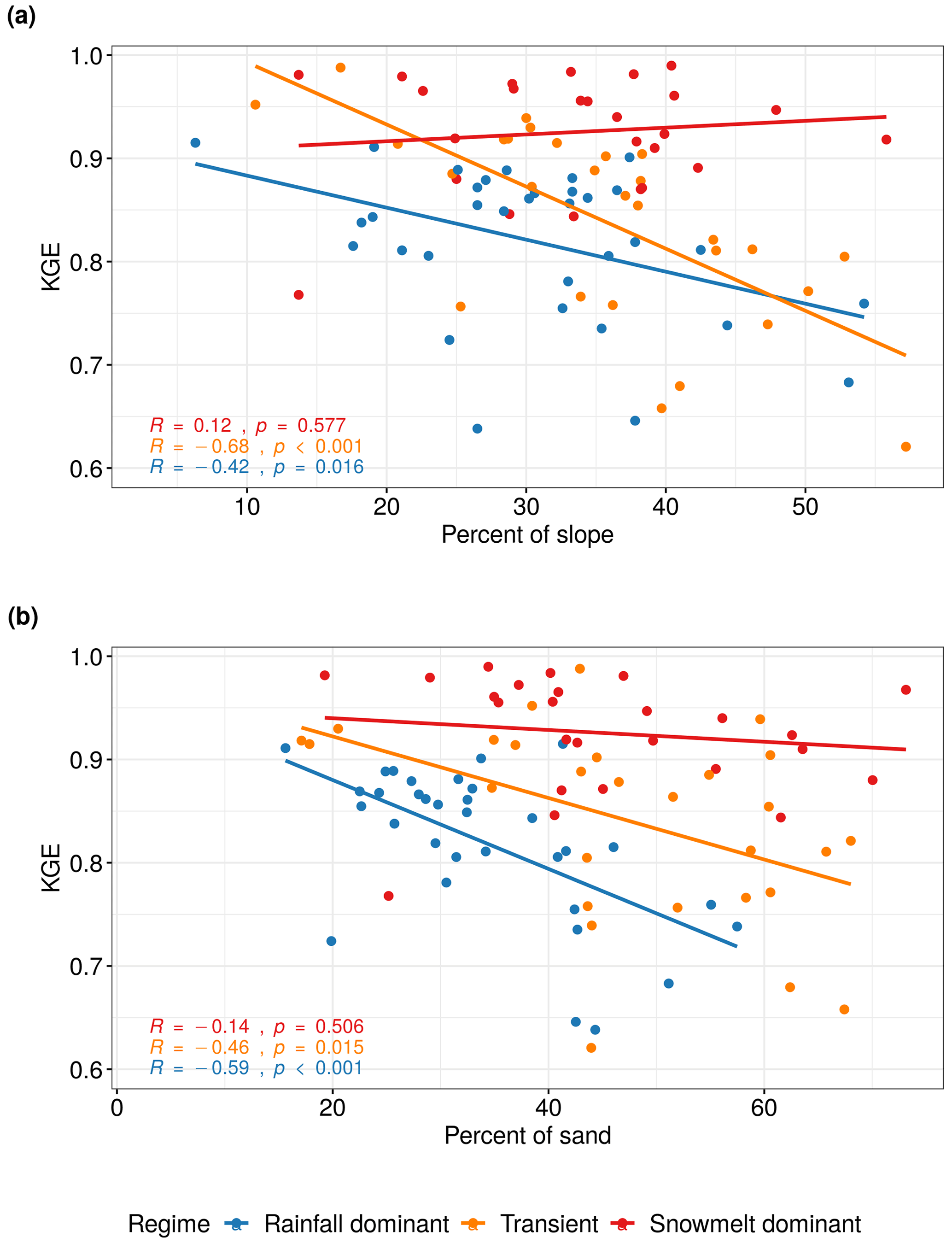
Figure 11KGE scores plotted against (a) the average percent of slope and (b) the average percent of sand in soil at each watershed. Best-fit lines were determined using simple linear regression. Pearson correlation coefficients were computed with associated significance.
4.6 Effects of watershed characteristics on model performance
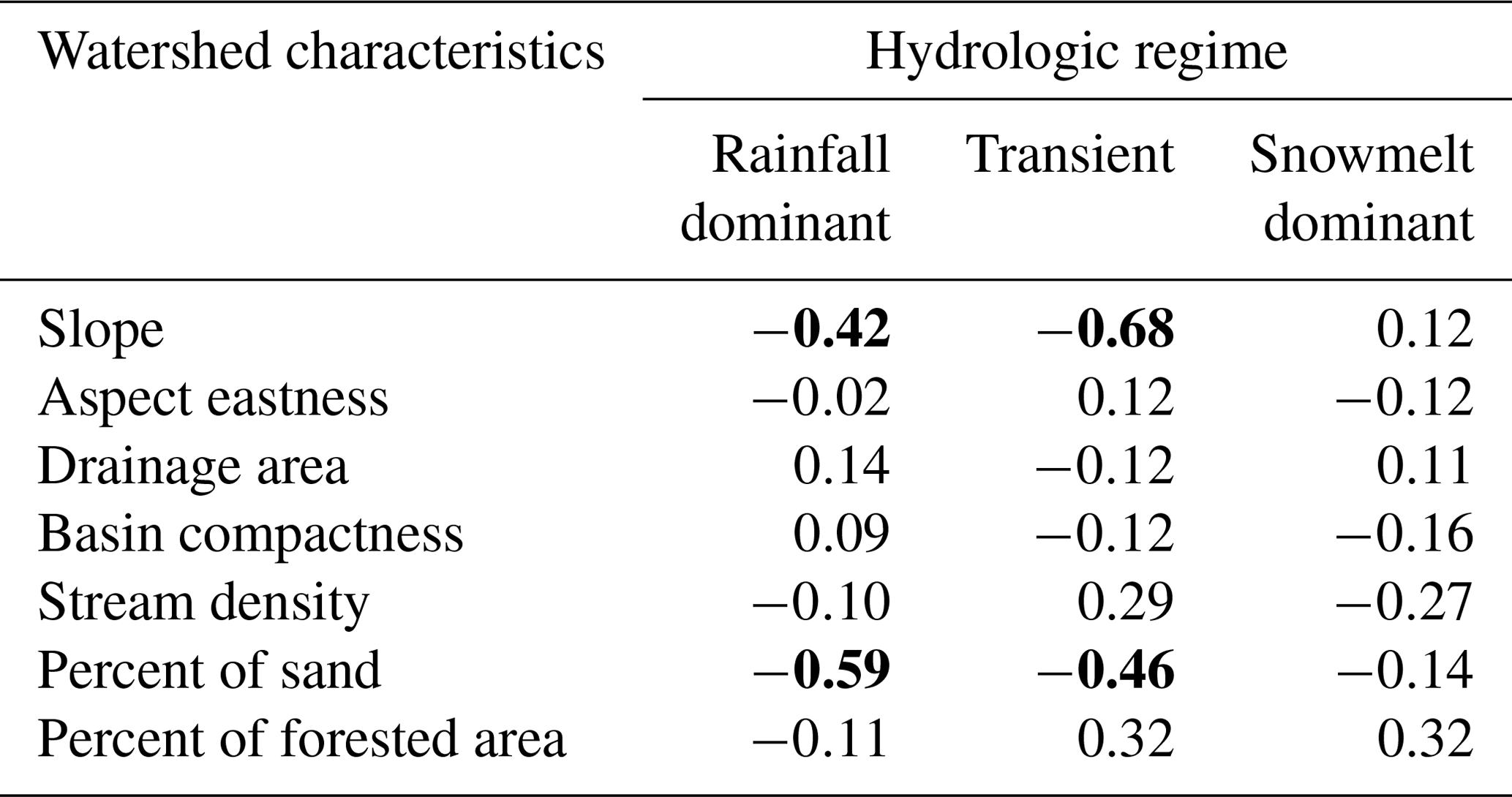
To explore the role of catchment characteristics such as geology, topography, and land cover in the performance of the RF model, we perform a Pearson correlation test between the KGE scores and selected basin physical characteristics for each flow regime. These watershed characteristics were compiled as part of the GAGES-II dataset using national data sources including US National Land Cover Database (NLCD) 2006 version, the 100 m resolution National Elevation Dataset (NED), and the Digital General Soil Map of the United States (STATSGO2) (Table S1 in the Supplement). The results are shown in Table 5. There is a strong negative correlation (p<0.05) between KGE scores and watershed slopes among rainfall-dominated and transient watersheds (Fig. 11a). As a steeper hillslope is often associated with faster surface and subsurface water movement during event-flow runoff, this can result in a shorter response time. We observe a similar trend between KGE scores and the percent of sand in the soil (Fig. 11b); the RF performs worse in watersheds with higher hydraulic conductivity (i.e., higher sand content). This could be a result of rapid subsurface flow from the soil profile enabled by soil macropores in mountainous forested area (Srivastava et al., 2017), where subsurface flow is the predominant mechanism. Without a quantification of the partition of discharge into surface flow and subsurface flow at individual watersheds, it is difficult to determine the relative importance of subsurface runoff mechanisms in regulating streamflow and how that may have affected the RF performance. The findings, however, suggest that RF performance can deteriorate at watersheds with quick-response runoff when supplied with 1 d delayed observation data.
It appears that stream density and the amount of vegetation cover may also affect the performance of RF, but the relationships are not statistically significant at α=0.05. Aspect eastness, drainage area, and basin compactness are not determining factors for variability in the KGE scores. We also explored the impact of land use and land cover, which can be represented by the extent of impervious cover in each watershed. However, because we only selected unregulated watersheds that experienced minimal human disruption during the initial screening, most watersheds have very little impervious cover (less than 5 %). It is noted that these selected characteristics are not meant to be exhaustive, but rather representative of various types of factors that could help explain the variability in model performance. Furthermore, an alternative approach to Pearson's correlation is to use analysis of variance (ANOVA) to test for marginal significance of each catchment variable to KGE while accounting for their interaction. Because our objective is not to make inferences on KGE based on these variables and ANOVA can be complicated to interpret, we choose to compute the correlation coefficient.
Table 5Pearson correlation coefficient between KGE scores and selected basin physical characteristics. Bold values indicate that the relationship is significant at the 5 % or 1 % level.
4.7 Limitations and future research
There are some notable limitations in our study and RF in general. The classification of watersheds into three flow regimes was based on the timing of the climatological mean of the annual flow volume, which can fluctuate from year to year. This is particularly true for the watersheds in the transient group for which streamflow is contributed by a mixture of runoff from winter rainfall and springtime snowmelt and the interannual variability is tremendous in both magnitude and timing (Lundquist et al., 2009). Therefore, the membership in the classified watersheds from this group can vary. In fact, Mantua et al. (2009) discussed the future shift of transient runoff watersheds towards rainfall-dominated in Washington State. Because we trained RF using the same input variables for all watersheds regardless of flow regimes and calculated performance criteria separately, the classification does not alter the results at individual watersheds.
In the study, we used estimated precipitation from PRISM, which is an interpolation product that combines data from various rain gauges from multiple networks. Despite possible introduced errors and uncertainty, we believe the use of a spatially distributed product better represents the areal estimation of precipitation over the watershed than a single rain gauge measurement. In a real-time forecast, this would be not be feasible due to the added time to compile and process such data. Similarly, we provided the RF model with a basin-average SWE from SNOTEL stations as an estimate of snowpack conditions. Using more spatially consistent SWE data such as those from the Snow Data Assimilation System (Pan et al., 2003) product would potentially improve model accuracy. As our results indicate that RF can produce reasonable forecasts, potential future research could explore the sensitivity of the model using satellite-derived snow products with station data and even include t+1 precipitation forecasts as a predictor in the model.
An inherent limitation of RF is the lack of direct uncertainty quantification in prediction. In our case, the forecasted streamflow using RF does not yield a standard error comparable to that provided by a traditional regression model, and hence there is no way to provide probabilistic confidence intervals for predictions. Methods to estimate confidence intervals have been proposed by Wager et al. (2014), Mentch and Hooker (2016), and Coulston et al. (2016), but they are not widely applied. For future work, the computation of confidence intervals in RF prediction will be useful in addressing and understanding uncertainty.
Accurate streamflow forecast has extensive applications across disciplines from water resources and planning to engineering design. In this study, we assessed the ability of RF to make daily streamflow forecasts at 86 watersheds in the Pacific Northwest Hydrologic Region. Key results are summarized below.
-
Based on the KGE scores (ranging from 0.62 to 0.99), we show that RF is capable of producing skillful forecasts across all watersheds.
-
RF performs better in snowmelt-dominated watersheds, which can be attributed to stronger persistence in the streamflow time series. The largest improvements in forecast compared to the naïve model are found among rainfall-dominated watersheds.
-
The two approaches for measuring predictor importance yield noticeably different results. We recommend that interpretation of the these two measures should be coupled with understanding of the physical processes and how these processes are connected.
-
Increases in the steepness of the slope and the amount of sand content are found to deteriorate RF performance in two flow regime groups. This demonstrates that catchment characteristics can cause variability in performance of the model and should be considered in both predictor selection and evaluation of the model.
Considering the current and future vulnerabilities of the Pacific Northwest to flooding caused by extreme precipitation and significant snowmelt events (Ralph et al., 2014), skillful streamflow forecasts can have important implications. Due to practical applications, RF and RF-based algorithms continue to gain popularity in hydrological studies (Tyralis et al., 2019). Given the promising results from our study, RF can be used as part of an ensemble of models to achieve better generalization ability and accuracy not only in streamflow forecast but also in other water-related applications in this region.
Example code for building a random forest model in R and data are available at https://github.com/leopham95/RandomForestStreamflowForecast (Pham, 2020).
The supplement related to this article is available online at: https://doi.org/10.5194/hess-25-2997-2021-supplement.
LTP was responsible for conceptualization, data curation, formal analysis, funding acquisition, investigation, methodology, project administration, software, validation, visualization, and writing the original draft. LL was responsible for conceptualization, investigation, methodology, funding acquisition, supervision, project administration, resources, and writing the original draft. AOF was responsible for resources, supervision, funding acquisition, and writing the original draft.
The authors declare that they have no conflict of interest.
We wish to express deep gratitude to the researchers at the National Supercomputing Center in Wuxi, China, and Tyler Willson at Michigan State University for the initial brainstorming and project development.
Leo Triet Pham was supported by the Algorithms and Software for SUpercomputers with emerging aRchitEctures fellowship funded by the National Science Foundation (grant no. NSF-1827093). Lifeng Luo's effort was partially supported by the National Science Foundation (grant no. NSF-2006633).
This paper was edited by Dimitri Solomatine and reviewed by Francesco Avanzi and one anonymous referee.
Adamowski, J. F.: Development of a short-term river flood forecasting method for snowmelt driven floods based on wavelet and cross-wavelet analysis, J. Hydrol., 353, 247–266, 2008. a
Altman, D. G. and Bland, J. M.: Statistics notes Variables and parameters, Brit. Med. J., 318, 1667, 1999. a
Aubert, D., Loumagne, C., and Oudin, L.: Sequential assimilation of soil moisture and streamflow data in a conceptual rainfall–runoff model, J. Hydrol., 280, 145–161, 2003. a
Bernard, S., Heutte, L., and Adam, S.: Influence of hyperparameters on random forest accuracy, in: International Workshop on Multiple Classifier Systems, Springer, Berlin, Heidelberg, 171–180, 2009. a, b
Boyle, D. P., Gupta, H. V., and Sorooshian, S.: Toward improved calibration of hydrologic models: Combining the strengths of manual and automatic methods, Water Resour. Res., 36, 3663–3674, 2000. a
Breiman, L.: Random forests, Mach. Learn., 45, 5–32, 2001. a, b, c, d, e, f
Breiman, L., Friedman, J., Stone, C. J., and Olshen, R. A.: Classification and regression trees, CRC Press, Boca Raton, Florida, 1984. a, b
Calle, M. L. and Urrea, V.: Letter to the editor: stability of random forest importance measures, Brief. Bioinform., 12, 86–89, 2010. a
Carvalho, D. V., Pereira, E. M., and Cardoso, J. S.: Machine learning interpretability: A survey on methods and metrics, Electronics, 8, 832, https://doi.org/10.3390/electronics8080832, 2019. a
Cayan, D. R., Redmond, K. T., and Riddle, L. G.: ENSO and hydrologic extremes in the western United States, J. Climate, 12, 2881–2893, 1999. a
Chen, X. and Ishwaran, H.: Random forests for genomic data analysis, Genomics, 99, 323–329, 2012. a
Cho, E. and Jacobs, J. M.: Extreme Value Snow Water Equivalent and Snowmelt for Infrastructure Design over the Contiguous United States, Water Resou. Res., 56, e2020WR028126, https://doi.org/10.1029/2020WR028126, 2020. a
Coulston, J. W., Blinn, C. E., Thomas, V. A., and Wynne, R. H.: Approximating prediction uncertainty for random forest regression models, Photogramm. Eng. Rem. S., 82, 189–197, 2016. a
Dawson, C. W., Abrahart, R. J., Shamseldin, A. Y., and Wilby, R. L.: Flood estimation at ungauged sites using artificial neural networks, J. Hydrol., 319, 391–409, 2006. a
Di Luzio, M., Johnson, G. L., Daly, C., Eischeid, J. K., and Arnold, J. G.: Constructing retrospective gridded daily precipitation and temperature datasets for the conterminous United States, J. Appl. Meteorol. Clim., 47, 475–497, 2008. a
Dibike, Y. B. and Solomatine, D. P.: River flow forecasting using artificial neural networks, Phys. Chem. Earth Pt. B, 26, 1–7, 2001. a
Dingman, S. L.: Physical hydrology, Waveland Press, Long Grove, Illinois, 104–106, 2015. a
Elsner, M. M., Cuo, L., Voisin, N., Deems, J. S., Hamlet, A. F., Vano, J. A., Mickelson, K. E., Lee, S.-Y., and Lettenmaier, D. P.: Implications of 21st century climate change for the hydrology of Washington State, Climatic Change, 102, 225–260, 2010. a
Falcone, J. A.: GAGES-II: Geospatial attributes of gages for evaluating streamflow, Tech. rep., US Geological Survey, https://doi.org/10.3133/70046617, 2011. a
Graham, C. B., Barnard, H. R., Kavanagh, K. L., and McNamara, J. P.: Catchment scale controls the temporal connection of transpiration and diel fluctuations in streamflow, Hydrol. Process., 27, 2541–2556, 2013. a
Gregorutti, B., Michel, B., and Saint-Pierre, P.: Correlation and variable importance in random forests, Stat. Comput., 27, 659–678, 2017. a
Gupta, H. V., Sorooshian, S., and Yapo, P. O.: Status of automatic calibration for hydrologic models: Comparison with multilevel expert calibration, J. Hydrol. Eng., 4, 135–143, 1999. a
Gupta, H. V., Kling, H., Yilmaz, K. K., and Martinez, G. F.: Decomposition of the mean squared error and NSE performance criteria: Implications for improving hydrological modelling, J. Hydrol., 377, 80–91, 2009. a
Huang, B. F. and Boutros, P. C.: The parameter sensitivity of random forests, BMC Bioinformatics, 17, 1–13, 2016. a, b, c
Hwang, S. H., Ham, D. H., and Kim, J. H.: A new measure for assessing the efficiency of hydrological data-driven forecasting models, Hydrolog. Sci. J., 57, 1257–1274, 2012. a
Ishwaran, H. and Lu, M.: Standard errors and confidence intervals for variable importance in random forest regression, classification, and survival, Stat. Med., 38, 558–582, 2019. a
James, G., Witten, D., Hastie, T., and Tibshirani, R.: An introduction to statistical learning,Springer, New York, 113, 246–247, 2013. a
Johnstone, J. A.: A quasi-biennial signal in western US hydroclimate and its global teleconnections, Clim. Dynam., 36, 663–680, 2011. a
Karran, D. J., Morin, E., and Adamowski, J.: Multi-step streamflow forecasting using data-driven non-linear methods in contrasting climate regimes, J. Hydroinform., 16, 671–689, 2013. a
Knoben, W. J. M., Freer, J. E., and Woods, R. A.: Technical note: Inherent benchmark or not? Comparing Nash–Sutcliffe and Kling–Gupta efficiency scores, Hydrol. Earth Syst. Sci., 23, 4323–4331, https://doi.org/10.5194/hess-23-4323-2019, 2019. a, b
Knowles, N., Dettinger, M. D., and Cayan, D. R.: Trends in snowfall versus rainfall in the western United States, J. Climate, 19, 4545–4559, 2006. a
Knowles, N., Dettinger, M., and Cayan, D.: Trends in snowfall versus rainfall for the western united states, 1949–2001, prepared for California energy commission public interest energy research program, Sacramento, California, 2007. a
Kuhn, M. et al.: Building predictive models in R using the caret package, J. Stat. Softw., 28, 1–26, 2008. a
Legates, D. R. and McCabe Jr., G. J.: Evaluating the use of “goodness-of-fit” measures in hydrologic and hydroclimatic model validation, Water Resour. Res., 35, 233–241, 1999. a, b
Li, D., Wrzesien, M. L., Durand, M., Adam, J., and Lettenmaier, D. P.: How much runoff originates as snow in the western United States, and how will that change in the future?, Geophys. Res. Lett., 44, 6163–6172, 2017. a
Li, X., Sha, J., and Wang, Z.-L.: Comparison of daily streamflow forecasts using extreme learning machines and the random forest method, Hydrolog. Sci. J., 64, 1857–1866, 2019. a
Liaw, A. and Wiener, M.: : Classification and regression by randomForest, R News, 2, 18–22, 2002. a, b, c
Louppe, G., Wehenkel, L., Sutera, A., and Geurts, P.: Understanding variable importances in forests of randomized trees, in: Advances in neural information processing systems, 26, 431–439, 2013. a
Lundquist, J. D., Dettinger, M. D., Stewart, I. T., and Cayan, D. R.: Variability and trends in spring runoff in the western United States, Climate warming in western North America: evidence and environmental effects, University of Utah Press, Salt Lake City, Utah, USA, in: Climate Warming in Western North America: Evidence and Environmental Effects, 63–76, 2009. a
Mantua, N., Tohver, I., and Hamlet, A. F.: Impacts of Climate Change on Key Aspects of Freshwater Salmon Habitat in Washington State, The Washington Climate Change Impacts Assessment: Evaluating Washington's Future in a Changing Climate, University of Washington Climate Impacts Group, Seattle, WA, https://doi.org/10.7915/CIG6QZ23J, 2009. a, b
Mass, C.: The weather of the Pacific Northwest, University of Washington Press, Seattle, Washington, 34–35, 2015. a
Mentch, L. and Hooker, G.: Quantifying uncertainty in random forests via confidence intervals and hypothesis tests, J. Mach. Learn. Res., 17, 841–881, 2016. a
Mittermaier, M. P.: The potential impact of using persistence as a reference forecast on perceived forecast skill, Weather Forecast., 23, 1022–1031, 2008. a
Mosavi, A., Ozturk, P., and Chau, K.-w.: Flood prediction using machine learning models: Literature review, Water, 10, 1536, https://doi.org/10.3390/w10111536, 2018. a, b, c
Mote, P. W., Li, S., Lettenmaier, D. P., Xiao, M., and Engel, R.: Dramatic declines in snowpack in the western US, NPJ Climate and Atmospheric Science, 1, 1–6, 2018. a
Nicodemus, K. K.: Letter to the editor: On the stability and ranking of predictors from random forest variable importance measures, Brief. Bioinform., 12, 369–373, 2011. a
Obringer, R. and Nateghi, R.: Predicting urban reservoir levels using statistical learning techniques, Sci. Rep.-UK 8, 5164, https://doi.org/10.1038/s41598-018-23509-w, 2018. a, b
Oshiro, T. M., Perez, P. S., and Baranauskas, J. A.: How many trees in a random forest?, in: International workshop on machine learning and data mining in pattern recognition, Springer, Berlin, Heidelberg, 154–168, 2012. a, b
Pagano, T. C., Garen, D. C., Perkins, T. R., and Pasteris, P. A.: Daily updating of operational statistical seasonal water supply forecasts for the western US 1, J. Am. Water Resour. As., 45, 767–778, 2009. a, b
Pal, M.: Random forest classifier for remote sensing classification, Int. J. Remote Sens., 26, 217–222, 2005. a
Pan, M., Sheffield, J., Wood, E. F., Mitchell, K. E., Houser, P. R., Schaake, J. C., Robock, A., Lohmann, D., Cosgrove, B., Duan, Q., and Luo, L.: Snow process modeling in the North American Land Data Assimilation System (NLDAS): 2. Evaluation of model simulated snow water equivalent, J. Geophys. Res.-Atmos., 108, 8850, https://doi.org/10.1029/2003JD003994, 2003. a, b
Papacharalampous, G. A. and Tyralis, H.: Evaluation of random forests and Prophet for daily streamflow forecasting, Advances in Geosciences, 45, 201–208, 2018. a
Payne, J. T., Wood, A. W., Hamlet, A. F., Palmer, R. N., and Lettenmaier, D. P.: Mitigating the effects of climate change on the water resources of the Columbia River basin, Climatic Change, 62, 233–256, 2004. a
Pham, L. T.: Random Forest Streamflow Forecast (2020), GitHub, available at: https://github.com/leopham95/RandomForestStreamflowForecast, last access: 15 June 2020. a
Probst, P., Wright, M. N., and Boulesteix, A.-L.: Hyperparameters and tuning strategies for random forest, WIRES Data Min. Knowl., 9, e1301, https://doi.org/10.1002/widm.1301, 2019. a, b, c, d
Ralph, F., Dettinger, M., White, A., Reynolds, D., Cayan, D., Schneider, T., Cifelli, R., Redmond, K., Anderson, M., Gherke, F., and Jones, J.: A vision for future observations for western US extreme precipitation and flooding, Journal of Contemporary Water Research & Education, 153, 16–32, 2014. a, b
Rasouli, K., Hsieh, W. W., and Cannon, A. J.: Daily streamflow forecasting by machine learning methods with weather and climate inputs, J. Hydrol., 414, 284–293, 2012. a, b
Regonda, S. K., Rajagopalan, B., Clark, M., and Pitlick, J.: Seasonal cycle shifts in hydroclimatology over the western United States, J. Climate, 18, 372–384, 2005. a
Ribeiro, M. T., Singh, S., and Guestrin, C.: Model-agnostic interpretability of machine learning, arXiv [preprint], arXiv:1606.05386, last access: 16 June 2016. a
Safeeq, M., Mauger, G. S., Grant, G. E., Arismendi, I., Hamlet, A. F., and Lee, S.-Y.: Comparing large-scale hydrological model predictions with observed streamflow in the Pacific Northwest: effects of climate and groundwater, J. Hydrometeorol., 15, 2501–2521, 2014. a
Salathé Jr, E. P., Hamlet, A. F., Mass, C. F., Lee, S.-Y., Stumbaugh, M., and Steed, R.: Estimates of twenty-first-century flood risk in the Pacific Northwest based on regional climate model simulations, J. Hydrometeorol., 15, 1881–1899, 2014. a
Seibold, H., Bernau, C., Boulesteix, A.-L., and De Bin, R.: On the choice and influence of the number of boosting steps for high-dimensional linear Cox-models, Comput. Stat., 33, 1195–1215, 2018. a
Shortridge, J. E., Guikema, S. D., and Zaitchik, B. F.: Machine learning methods for empirical streamflow simulation: a comparison of model accuracy, interpretability, and uncertainty in seasonal watersheds, Hydrol. Earth Syst. Sci., 20, 2611–2628, https://doi.org/10.5194/hess-20-2611-2016, 2016. a, b
Shrikumar, A., Greenside, P., and Kundaje, A.: Learning important features through propagating activation differences, arXiv [preprint], arXiv:1704.02685, last access: 17 July 2017. a
Sitterson, J., Knightes, C., Parmar, R., Wolfe, K., Avant, B., and Muche, M.: An overview of rainfall-runoff model types, EPA Office of Research and Development (8101R) Washington, DC 20460, 2018. a
Srivastava, A., Wu, J. Q., Elliot, W. J., Brooks, E. S., and Flanagan, D. C.: Modeling streamflow in a snow-dominated forest watershed using the Water Erosion Prediction Project (WEPP) model, T. ASABE, 60, 1171–1187, 2017. a
Strobl, C., Boulesteix, A.-L., Zeileis, A., and Hothorn, T.: Bias in random forest variable importance measures: Illustrations, sources and a solution, BMC Bioinformatics, 8, 1–21, 2007. a, b
Tohver, I. M., Hamlet, A. F., and Lee, S.-Y.: Impacts of 21st-century climate change on hydrologic extremes in the Pacific Northwest region of North America, J. Am. Water Resour. As., 50, 1461–1476, 2014. a
Tolson, B. A. and Shoemaker, C. A.: Dynamically dimensioned search algorithm for computationally efficient watershed model calibration, Water Resour. Res., 43, W01413, https://doi.org/10.1029/2005WR004723, 2007. a
Tongal, H. and Booij, M. J.: Simulation and forecasting of streamflows using machine learning models coupled with base flow separation, J. Hydrol., 564, 266–282, 2018. a, b
Tyralis, H., Papacharalampous, G., and Langousis, A.: A brief review of random forests for water scientists and practitioners and their recent history in water resources, Water, 11, p. 910, 2019. a
U.S. Geological Survey: U.S. Geological Survey, 2019, National Hydrography Dataset (ver. USGS National Hydrography Dataset Best Resolution (NHD) for Hydrologic Unit (HU) 4 – 2001), available at: https://www.usgs.gov/core-science-systems/ngp/national-hydrography/access-national-hydrography-products (last access: 6 June 2020), 2020. a
Van Rijn, J. N. and Hutter, F.: Hyperparameter importance across datasets, in: Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 2367–2376, 2018. a
Vano, J. A., Nijssen, B., and Lettenmaier, D. P.: Seasonal hydrologic responses to climate change in the Pacific Northwest, Water Resour. Res., 51, 1959–1976, 2015. a
Wager, S., Hastie, T., and Efron, B.: Confidence intervals for random forests: The jackknife and the infinitesimal jackknife, J. Mach. Learn. Research, 15, 1625–1651, 2014. a
Wang, Z., Lai, C., Chen, X., Yang, B., Zhao, S., and Bai, X.: Flood hazard risk assessment model based on random forest, J. Hydrol., 527, 1130–1141, 2015. a, b
Wenger, S. J., Luce, C. H., Hamlet, A. F., Isaak, D. J., and Neville, H. M.: Macroscale hydrologic modeling of ecologically relevant flow metrics, Water Resour. Res., 46, W09513, https://doi.org/10.1029/2009WR008839, 2010. a, b
Wilcoxon, F., Katti, S., and Wilcox, R. A.: Critical values and probability levels for the Wilcoxon rank sum test and the Wilcoxon signed rank test, Selected tables in mathematical statistics, 1, 171–259, 1970. a
Zheng, X., Wang, Q., Zhou, L., Sun, Q., and Li, Q.: Predictive Contributions of Snowmelt and Rainfall to Streamflow Variations in the Western United States, Adv. Meteorol., 2018, p. 14, 2018. a